
�������: 16-30 ���鵽�����ƿ�ѧ�뼼�� ���Ʒ�������ؼ�¼117�� . ��ѯʱ��(1.251 ��)
�й���ѧԺ�Ϻ�Ӧ�������о���ר����һ�ֻ���EPICS���ĵ���������ϵͳ�������Ʒ���
�й���ѧԺ�Ϻ�Ӧ�������о��� ר�� EPICS �ĵ����� ����ϵͳ
2023/8/3
�й���ѧԺ�Ϻ�Ӧ�������о���ר����һ�ֻ���EPICS���ĵ���������ϵͳ�������Ʒ���
�й���ѧԺ�����о���ר�������ܼҾ����Ʒ�����װ�á�MCU��ϵͳ
�й���ѧԺ����ѧ�о���ר����һ�־���Ⱥ�ʩ��ϵͳ�������Ʒ���
Ϊ����ߵ�ѹ˫����ֱ�������ϼ����������,�о��˵�ѹ˫����ֱ���������Իָ����Ʒ�����������ȡ��ѹ˫����ֱ������������,������ѹ˫����ֱ����������ȶ�������,����ֱ���������Իָ��������ٶԵ�ѹ˫����ֱ�����������������Ż����,���ݲ��������,���й����Իָ�������״̬Ѱ�š�ͨ��ֱ�������������������е�ѹ˫����ֱ���������Իָ���ģ������,�ڴ˻����Ͻ��в�����ʶ������������,�Դ����...
�й���ѧԺ�����Ƚ������о�Ժ�������ͷ�������������˵ĸ����˶�ѧϰ���Ʒ�����ͼ��
���� ������������ �����˶� ѧϰ���Ʒ���
2023/5/18
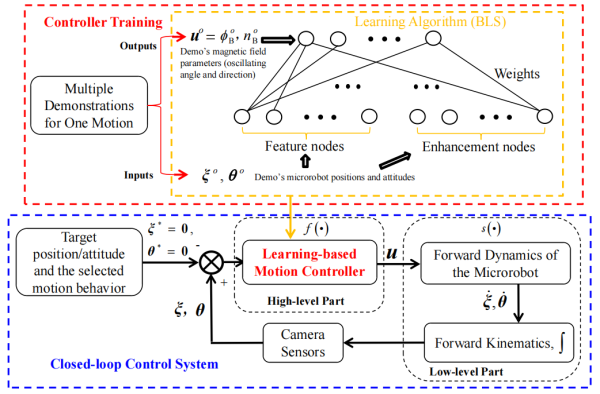
���գ��й���ѧԺ�����Ƚ������о�Ժ���о�Ա�������о�Ա�������ŶӺ����������һ������ͷ�������������˵ĸ����˶�ѧϰ���Ʒ�����ͨ������ѧϰ����ѵ������˿ɿشų��仯���������˶��ֶ�����Ԫ֮��Ĺ�ϵ���ɣ�ʵ���˷�������˵ĸ����˶������Ҹ��������踴�ӵ��Σ�����������³���ȶ��ԣ��������˶����̲�������Ŷ�Ӱ�졣����о��ɹ���A Robot Motion Learning Method Using ...

2023��5��18�գ��й���ѧԺ�����Ƚ������о�Ժ���о�Ա�������о�Ա�������ŶӺ����������һ������ͷ�������������˵ĸ����˶�ѧϰ���Ʒ�����ͨ������ѧϰ����ѵ������˿ɿشų��仯���������˶��ֶ�����Ԫ֮��Ĺ�ϵ���ɣ�ʵ���˷�������˵ĸ����˶������Ҹ��������踴�ӵ��Σ�����������³���ȶ��ԣ��������˶����̲�������Ŷ�Ӱ�졣����о��ɹ���A Robot Motion Learning Metho...
�й���ѧԺ�����������о���ר����һ�ֶ༶�������ʽ��������ȼ������װ�ü������Ʒ���
�й���ѧԺ�����������о��� ר�� �༶���� �������� ȼ������װ��
2023/5/15
�й���ѧԺ�����������о���ר����һ�ֶ༶�������ʽ��������ȼ������װ�ü������Ʒ���
���ٶ���������������ģ������Ӧ���Ʒ���
�г��Զ���ʻ ��ģ������Ӧ���� �ٶȸ��� �������� ���ܿ��� ƫ��ʽ����ģ��
2024/1/17
��Զ�������ٶȸ�����������,ͬʱ���ǵ����л���ģ�͵����Ʒ�����ϵͳ����ѧģ�͵�������,�Լ���ͳ��ģ������Ӧ����ʱ����������㷨�ĸ�����,���Ľ��Ķ���������(Multiple-input multiple-output,MIMO)ƫ��ʽ��̬���Ի���ģ������Ӧ����(Partial form dynamic linearization-improved model-free adaptive con...
Ϊ�������˫�������б�²����ȶ���,���������һ�ֻ������ǿ��ѧϰ������˫������˲�̬���Ʒ���.ͨ����������˫������˵Ļ�϶���ѧģ�����ȶ����߹���,������״̬�ռ䡢�����ռ䡢episode�����뽱������.�����û���DDPG�Ľ���Ape-X DPG�㷨����ѧϰ��,����˫����������ڽϴ�б�·�Χ��ʵ���ȶ�����.����ʵ�����,Ape-X DPG������ѧϰ�������������ٶȾ����ڻ���PER��DDP...
��Ի�е���뻷���Ӵ�ʱ�������ٶ�̬��Ӧ�ٶ��������⣬����˻���ʵʱ�Ż��Ŵ��㷨���迹���Ʒ��������о������У����ݻ�е�ۺ������ٵ���Ӧ�ٶȺ��������ȵ��ۺ�����ָ�꣬�Ľ��������Ż����Ŵ��㷨�Ľ��桢����ͼ�����Ӧ��ֵ�Ȳ������ӵĴ�����ʽ��ʵ�����迹���Ʒ����е�����������ʵʱ�Ż����������������봫ͳ���Ʒ�����ȣ������������ڱ�֤�������ȵ�ǰ���£�����˻�е���뻷���Ӵ����Ķ�̬��Ӧ�ٶȣ��������������̳�...

�й���ѧԺ�Զ����о�����������Ե���ϵͳ�����Ż����Ʒ�����ͼ��
�й���ѧԺ�Զ����о��� �����Ե���ϵͳ �����Ż����Ʒ���
2018/8/6
�й���ѧԺ�Զ����о������ӹ���ϵͳ�����������ص�ʵ�������һ������Ե���ϵͳ������һ�ֻ�������ѧϰ���Ƶ������Ż����Ʒ�����ͨ���������Hamilton�CJacobi�CBellman���̣�ʵ�ֺ����ۿ����Ӵ��ۺ���ʱ�����ŷ��������������������ѧϰ�����������ͬ�ڴ�ͳ����Ӧ�����㷨����ӱȨֵ���²��ԣ����Ͷ���ϵͳ��ʼ�ȶ������ɵ�Ҫ���ɴ˸�����Ӧ����������ƴ������������
����������ģ�ͺ��������λ����˵Ķ���ѧ���̣����ڸö���ѧ��������������ʹ�����������ٶ��ȶ��ĹؽڽǶȲ�����.Ȼ��ͨ���������������������֮��Ĺ�ϵ����÷���Ħ��������ʱʹ�����ٶ��ȶ�����������.��ʵ�������ٶ��ȶ��Ļ����ϣ�����������ģ�ͻ���ʱʵ�ֻ������ٶȸ��ٵ���������.��������������ֵ���������������������ֵ��Ϊ�ؽڽǶȲ����ij�ֵ�������ٶȷ����ԹؽڽǶȽ������ڣ�����ģ�ͽ�...
Ϊ��ʵ����ĥϵͳ������ĩ�˵�λ�������ͽӴ������������һ�ֻ��ڱ�����˳װ�õĻ�������ĥϵͳ��/λ�����������.�ڻ�����ĩ�˰�װһ����˳װ��ʵ�ֶԹ���ĩ����������λ�������Ľ���.��˳װ��һ�˰�װ�ڻ�����ĩ�ˣ���һ��������ĥ����.����������������������ĩ��λ�ˣ���ӶԹ���ĩ��λ�˽��������Ͳ�������˳װ��������ֱ�����������빤���ĽӴ���.������ģ���������÷�����PD ������-�֣������������˳װ�õĶ�...
����ʽ���и��������˵Ļ�����Ʒ��������ȶ���
���и��� ��Ͽ��� �ȶ��� ����ģʽ������ �迹���� ��/ϥ�ؽ�����
2017/11/30
���������������������Ʋ��и����е��˻�������˳�ԺͶ�ؽ�Э������������̽��һ���Źؽ�CPG������ģʽ��������������ϥ�ؽڷּ��迹��������/ϥ�ؽ���������3�������ϵ����ͻ�����Ʒ��������ȣ�����CPG�Լ�����Ϊ�Ͷ��⽻�������Ի���������/���Źؽ�Ŀ��켣��������CPG�Գ�����������ά�������Źؽ�����λ���Ա�ʵ�ָ����˻������еIJ����ȶ��ԣ���Σ����ݲ�̬Ҫ����Ƹ��迹�͵��迹�ּ��������ɣ���...
Ϊ��С��������ִ�й켣�������������ĩ�˲�����λ�����ڽ��������˹켣��ƫϵͳģ�͵Ļ����ϣ������һ�ֻ����;�ƫ������ʵ�ַ������÷���ֱ���ڻ����˵Ĺؽڿռ��϶������в���������ǰ��ģ�ͺ�һϵ�м��裬���ȴ���ѧ��֤���˱��������־�ƫ�������ܹ�ʹ��ƫ����Ը�ָ������������˵�������;�ƫ����������Ч�ԣ�ʵ����������ͨ�����ú��ʵIJ������ڳ�ʼ�켣���ƫ��Ϊ8mm������£���ƫ������ƫ�������ֵС��0...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...