
�������: 1-5 ���鵽��֪ʶҪ�� ���ƿ�ѧ�뼼�� ���Ʒ�������ؼ�¼5�� . ��ѯʱ��(1.181 ��)
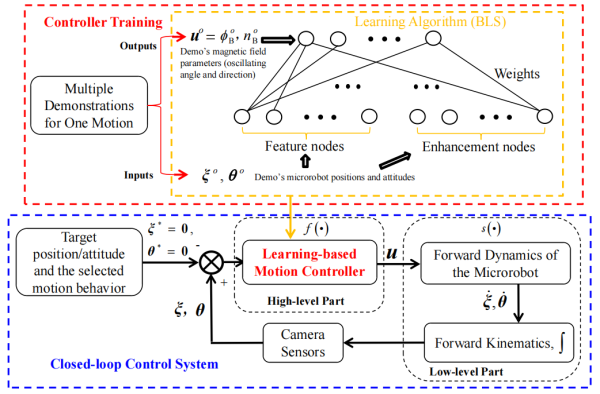
�й���ѧԺ�����Ƚ������о�Ժ�������ͷ�������������˵ĸ����˶�ѧϰ���Ʒ�����ͼ��
���� ������������ �����˶� ѧϰ���Ʒ���
2023/5/18
���գ��й���ѧԺ�����Ƚ������о�Ժ���о�Ա�������о�Ա�������ŶӺ����������һ������ͷ�������������˵ĸ����˶�ѧϰ���Ʒ�����ͨ������ѧϰ����ѵ������˿ɿشų��仯���������˶��ֶ�����Ԫ֮��Ĺ�ϵ���ɣ�ʵ���˷�������˵ĸ����˶������Ҹ��������踴�ӵ��Σ�����������³���ȶ��ԣ��������˶����̲�������Ŷ�Ӱ�졣����о��ɹ���A Robot Motion Learning Method Using ...

2023��5��18�գ��й���ѧԺ�����Ƚ������о�Ժ���о�Ա�������о�Ա�������ŶӺ����������һ������ͷ�������������˵ĸ����˶�ѧϰ���Ʒ�����ͨ������ѧϰ����ѵ������˿ɿشų��仯���������˶��ֶ�����Ԫ֮��Ĺ�ϵ���ɣ�ʵ���˷�������˵ĸ����˶������Ҹ��������踴�ӵ��Σ�����������³���ȶ��ԣ��������˶����̲�������Ŷ�Ӱ�졣����о��ɹ���A Robot Motion Learning Metho...

�й���ѧԺ�Զ����о�����������Ե���ϵͳ�����Ż����Ʒ�����ͼ��
�й���ѧԺ�Զ����о��� �����Ե���ϵͳ �����Ż����Ʒ���
2018/8/6
�й���ѧԺ�Զ����о������ӹ���ϵͳ�����������ص�ʵ�������һ������Ե���ϵͳ������һ�ֻ�������ѧϰ���Ƶ������Ż����Ʒ�����ͨ���������Hamilton�CJacobi�CBellman���̣�ʵ�ֺ����ۿ����Ӵ��ۺ���ʱ�����ŷ��������������������ѧϰ�����������ͬ�ڴ�ͳ����Ӧ�����㷨����ӱȨֵ���²��ԣ����Ͷ���ϵͳ��ʼ�ȶ������ɵ�Ҫ���ɴ˸�����Ӧ����������ƴ������������
���������Ʒ������ڻ������е�Ӧ�á���2010��ȱ����п�ѧ���������Ƚ�
���ܿ��Ʒ��� ������ 2010��� �����п�ѧ������ ���Ƚ�
2012/3/16
���գ��������������������ˡ�����2010��ȱ����п�ѧ���������ľ���������������ǿ�о�Ա���Զ����о�Ա��ɵġ��������Ʒ������ڻ������е�Ӧ�á��ٻ�2010��ȱ����п�ѧ���������Ƚ���
�������Ʒ����ڻ������е�Ӧ��ȡ���½�չ
���ܿ��Ʒ��� ������ Ӧ��
2012/3/16
���գ��Զ������е��ġ��������Ʒ������ڻ������е�Ӧ�á��о���Ŀ���2010��ȱ����п�ѧ���������Ƚ�������Ŀ��Ҫ����������Ʒ����������в��걸�Ĺؼ����ݽ����о����縴��ϵͳ��ģ���������⡢���ͽṹ���������Ʒ��������в�ȷ���Ժ��ⲿ���ŵķ�����ϵͳ��������������������ȣ����ڸ��ӻ�����ϵͳ�����˵���ʾ��Ӧ�á�
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...