
搜索结果: 1-15 共查到“信息科学与系统科学 复杂”相关记录121条 . 查询时间(0.157 秒)
中国科学院三维复杂循环应力状态下冻土疲劳破坏行为研究获进展
三维 循环 行为
2024/3/26
多年冻土区和季冻区边坡、路堤、地基等服役工况处于复杂三维应力状态下。研究三维应力状态冻土体在地震和车辆等动力荷载下的稳定性对寒区工程设施的运营维护和灾害防治具有重要实际意义。冻土的各向异性动力学特征受原生组构各向异性和次生三维应力路径、状态共同影响,在循环荷载下冻土的变形行为和疲劳破坏特性对其所处的三维应力环境具有强烈的依赖性。而传统的冻土力学研究设备无法模拟复杂三维应力环境,使得处于复杂三维应力...

"复杂环境建模与仿真"分论坛(图)
复杂环境 建模 仿真
2023/11/12
2023年10月14日至15日,以"数字经济、仿真发展"为主题的第三十五届中国仿真大会在安徽合肥召开,大会吸引了自来全国各地的政府有关部门、相关科研院所、高校、重点企业代表等1000余与会代表。中国工程院院士、中国仿真学会理事长曹建国,省委常委、合肥市委书记虞爱华出席大会并致辞,副省长张曙光出席。
中国科学院大学提出复杂时空动力系统数据驱动建模新方法(图)
复杂 时空动力系统 数据驱动 建模
2023/9/25
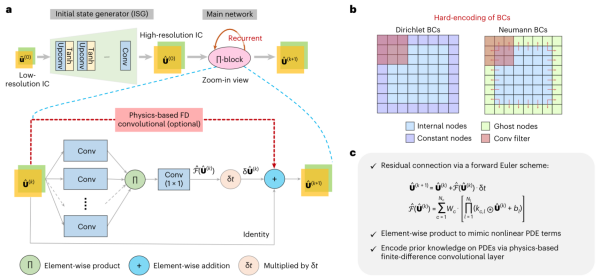
近期,中国科学院大学工程科学学院长聘教轨副教授刘扬在《自然-机器智能》(Nature Machine Intelligence)上,发表了题为Encoding physics to learn reaction-diffusion process的研究成果。该研究提出了新的物理知识嵌入深度学习架构即PeRCNN,用于偏微分方程(PDE)正反问题求解、非线性时空动力系统建模和控制方程发现,旨在改善复...
中国科学院沈阳自动化研究所在复杂工业数据预测建模方面获进展(图)
复杂工业数据 预测 建模
2023/7/18
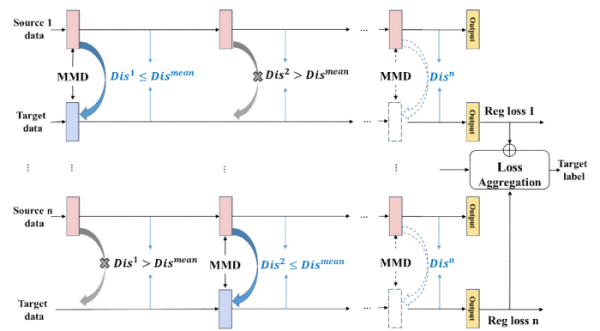
针对冶金等复杂工业建模过程中存在数据不足和算法冷启动的问题,中国科学院沈阳自动化研究所数字工厂研究室提出了一种基于动态迁移学习的、在有限数据量下的工业过程时间序列预测方法。该方法以提高多步时序预测精度、降低计算成本为目标,建立了复杂工业场景下的预测模型,提高了工业时序数据预测的准确性、高效性。相关研究成果发表在IEEE Transactions on Industrial Informatics上...
Academy of Mathematics and Systems Science, CAS Colloquia & Seminars:复杂目标电磁建模与计算:区域分解方法研究及进展
复杂目标 电磁建模 区域分解方法
2023/4/24
电磁建模与计算在雷达目标探测与识别、隐身与反隐身、电磁兼容性分析、无线通讯等诸多领域有着重要的需求,是长期以来国内外同行关注的重点方向。随着科学计算方法和高性能计算技术的飞速发展,电磁建模与计算研究取得了长足的进步,然而针对计算目标越来越复杂,计算需求越来越高,电磁建模与计算面临一系列的挑战。本报告重点介绍了区域分解方法研究及进展,包括基于积分方程方法、有限元方法、有限元-边界元混合方法的区域分解...

中国科学院软件所在复杂背景下雷达目标检测方面取得进展.(图)
雷达目标检测 智能检测 鲁棒性鲁棒性
2023/8/20
2023年4月17日,软件所天基综合信息系统重点实验室研究团队在复杂背景下的雷达目标检测方面取得了进展。研究论文《基于对比学习的航海雷达目标检测方法》在《电子学报》上发表,第一作者为博士生司凌宇,通信作者为助理研究员强文文。论文针对航海雷达目标检测中背景复杂、原始数据量大、有效数据量少以及检测任务困难等问题,提出了一种全新的基于对比学习的航海雷达目标检测方法(CLMRD,即Contrastive ...
Academy of Mathematics and Systems Science, CAS Colloquia & Seminars:最优传输框架下的生物复杂数据的建模与计算
最优 传输框架 生物复杂数据 建模计算
2023/4/13
当前,单细胞测序技术迅猛发展,为研究细胞命运决策、细胞-细胞通讯、肿瘤微环境、大脑细胞组成与结构等生物医学中的关键科学问题提供了基础。单细胞复杂数据的建模与计算为数据科学和机器学习等提出了新的问题与挑战。最优传输技术通过学习数据分布之间的最优成本效益下的映射,为复杂数据的分析提供了有力工具。本报告,将汇报我们近期发展的基于最优传输框架的单细胞高维异质多模态数据整合方法,以及时间序列单细胞数据的动态...
Academy of Mathematics and Systems Science, CAS Colloquia & Seminars:复杂系统GO法可靠性关键技术
复杂系统 GO法 可靠性关键技术
2023/4/28
针对具有多故障模式、复杂相关性、多输入闭环反馈、多状态性能稳定单元等特性的多功能可修系统,系统性地完善了基于GO法的复杂系统可靠性建模与分析方法,并在此基础上首次提出了基于GO法的复杂系统可靠性优化分配方法和基于GO法的复杂系统可靠性评估方法,形成了复杂系统GO法可靠性一体化技术的雏形,开发了相应的GO法可靠性一体化技术软件。所获成果极大地改进了GO法理论,而且拓宽了GO法理论与技术的应用范围。

2021年1月31日下午,复杂系统管理与控制国家重点实验室(实验室)2020年度战略指导委员会及学术委员会在中国科学院自动化研究所智能化大厦第八会议室成功召开。疫情期间,会议采用线上线下同步模式。实验室战略指导委员会主任吴宏鑫院士及委员(姓氏笔画)王天然院士、孙优贤院士、李国杰院士、李衍达院士、吴澄院士、张钹院士、陈十一院士、陈杰院士、柴天佑院士、钱锋院士和实验室学术委员会主任郑南宁院士及委员(姓...
我国学者找到破解复杂非线性控制问题的密钥
复杂 非线性 控制问题 破解密钥
2020/12/31
非线性系统结构复杂,形式多变,很难发展一个统一的、有效的研究方法。特别是在研究非线性系统的有限时间控制问题时,很难对其进行线性化处理(系统非光滑)。导致非线性系统,尤其是非线性时滞系统的研究进展缓慢,极大地阻碍了其实际应用。因此,如何化解这些困难成为了当务之急。日前,山东交通学院信息科学与电气工程学院电气系山东交通学院教授杨仁明带领团队完成的课题《复杂非线性时滞系统的控制研究》在该类问题的研究上取...
国防科技大学系统工程学院2021年博士研究生入学考试自命题复杂系统理与方法考试大纲。
结合无人机(UAV)的空中移动和无人车(UGV)的地面移动特点,本文提出了一种UAV/UGV空地协作系统,并且针对其在复杂地形中的追逃问题,提出了一种复杂三维多面体环境中UAV/UGV空地协作追逃策略。首先介绍了UAV/UGV空地协作系统的结构与协作追逃问题描述。接着将边界值问题(BVP)改进并离散化作为博弈走法生成器。然后,针对逃方已知追方位置,而追方只具备直线视野(LOS)的不利条件,分析了最...
基地化训练复杂电磁环境构设体系与生成系统研究
基地化训练 电磁环境构设 体系设计 生成系统
2020/8/21
针对基地训练构设实战化海上复杂电磁环境,设计了基地化训练复杂电磁环境构设体系,提出基地化训练复杂电磁环境构设发展建议,指导基地化训练复杂电磁环境构设相关应用。