
搜索结果: 1-9 共查到“知识要闻 机械工程 微型”相关记录9条 . 查询时间(0.092 秒)

小身材,大能量!徐工XE35U微型挖掘机“走红”东南亚(图)
徐工 挖掘机 东南亚
2023/9/6
铁臂擎天,晴空万里,随着象征顺利与希望的鞭炮声响起,数台徐工XE35U微型挖掘机在泰国经销商孔敬府网点圆满交付成功。现场,徐工销售服务团队与客户进行了密切交流,客户对于徐工挖掘机的产品性能和使用体验表达了高度认可。

超疏水微型机器人可以在外界刺激下在水面上高效游动,围绕这一现象科学家们展开了诸多研究,探索它的这一特性在诸多领域的应用前景,例如细胞操作,净化水源等。然而,目前大部分对于超疏水微型机器人的研究都是围绕单一刺激的驱动模式,使得超疏水微型机器人的运动和功能在复杂的水环境中受到了限制。
南方科技大学机械与能源工程系王宏强团队在微型机器人领域取得系列进展
王宏强 微型机器人 电机 Micromachines
2023/11/30
近日,南方科技大学机械与能源工程系王宏强副教授团队在机电领域顶级期刊之一IEEE Transactions on Mechatronics (TMech) 上发表了一篇关于单电机欠驱动的微型机器人的研究论文。论文标题为 “SimoBot: An Underactuated Miniature Robot Driven by a Single Motor”。
仿水黾微型机器人问世
仿水黾 微型机器人 多模态运动
2021/9/10
近日,中国科学院沈阳自动化研究所(以下简称沈阳自动化所)在微型机器人领域取得新进展。科研人员研究的仿水黾微型机器人可在红外光与磁场的联合驱动下实现可编程多模态运动,在微型机器人联合驱动、微流控输运、环境监测治理等方面具有重要作用。相关研究成果发表于《化学工程期刊》。

近日,中国科学院沈阳自动化研究所微纳米课题组在微型机器人研究领域又取得新突破,所研究的气泡微型机器人实现了对多个微结构的一体化装配及驱动,研究结果发表在ACS Applied Materials & Interfaces。机器人被广泛用于汽车制造、飞机喷漆等工业自动化领域,但用于生物医学的微结构部件装配尚未实现自动化。随着制造业的微型化,目前加工的微结构只有几十微米或几百微米长,如何对这么小的结构...

近日,中国科学院深圳先进技术研究院医工所纳米调控研究中心杜学敏研究团队与智能仿生中心吴新宇和徐天添研究团队合作,研发出受章鱼启发的多功能微型软体机器人,集成多模态运动、可控变形、光学伪装、可视化感知环境等功能于一体,极大提升了软体机器人在复杂限域空间内运动与执行多重任务的能力。研究成果以"Reconfiguration, Camouflage and Color-shifting for Bioi...
中国科研人员开发出“蚁群”微型机器人
中国 科研人员 蚁群 微型机器人
2019/3/25
中国科研人员日前开发出一种磁性微游动机器人,可像“蚁群”一样成千上万地组队协同作业,有望为高效靶向给药和体内成像提供解决方案。发表在新一期美国《科学・机器人学》杂志上的这一研究显示,这种呈花生状的磁性机器人长3微米,直径2微米,只有头发丝直径的约四十分之一。由大量这种机器人组成的群体可在旋转磁场的调控下变为长链,在狭长的模拟毛细血管中穿行。
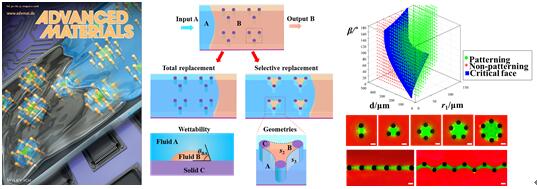
在国家自然科学基金委、科技部和中国科学院的大力支持下,中科院化学研究所绿色印刷重点实验室研究员宋延林课题组科研人员近年来在纳米材料印刷及图案化领域开展了深入系统的研究。他们突破传统印刷技术的精度极限,实现了微纳米尺度精细图案的印刷及纳米功能材料的可控组装(Adv. Mater. 2014, 26, 2501-2507;Adv. Mater. 2018, 30, 1703963),并发展了在印刷电...
中国科学院深圳先进技术研究院微型特种机器人研究取得新进展(图)
中国科学院深圳先进技术研究院 机器人
2017/10/13
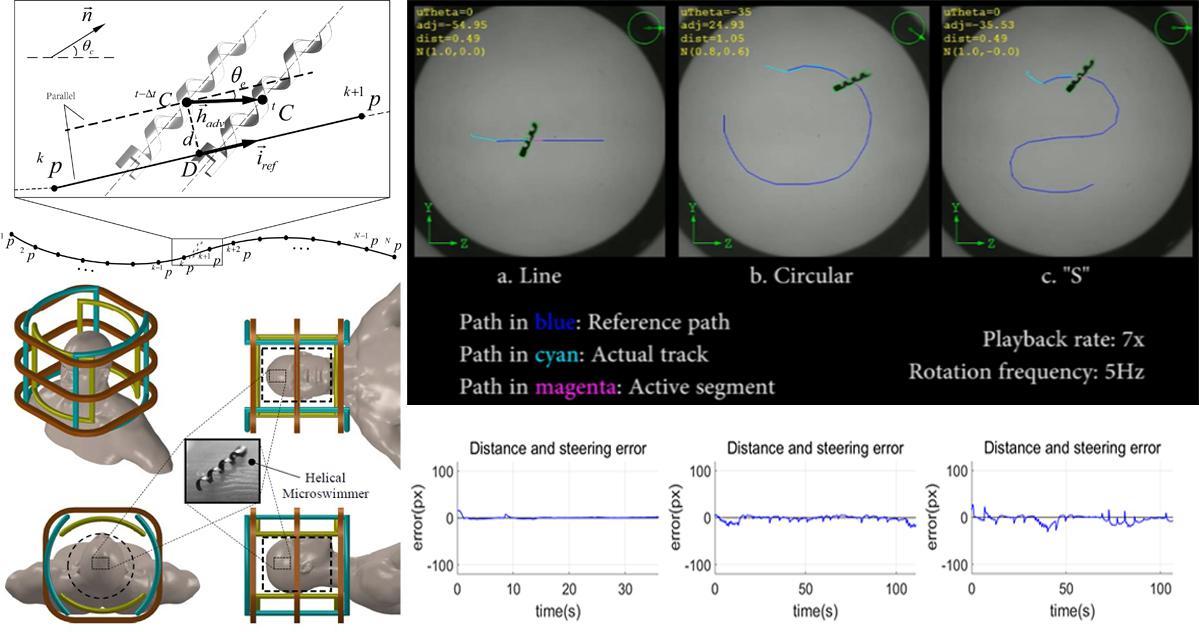
近日,在国家自然科学基金、深圳市科创委学科布局的资助下,中国科学院深圳先进技术研究院集成所智能仿生中心徐天添副研究员工作组经过长时间努力,成功研究出了针对低雷诺数液体中磁控微型机器人的路径跟随方法,以及一套全新的多自由度磁控装置。该成果具有更高的控制准确性,并且支持人机结合交互式控制,使微型机器人技术更加贴近实际应用。相关结果Image-Based Visual Servoing of Helic...