
搜索结果: 121-135 共查到“控制科学与技术 自动化”相关记录2318条 . 查询时间(0.425 秒)
上海交通大学自动化系博士生答辩信息:许洁
低增益反馈 分数阶线性系统 Caputo分数阶导数 执行器饱和 半全局渐近镇定
2023/5/10
论文题目:分数阶系统低增益反馈设计及执行器饱和下的半全局镇定。答辩人:许洁。时间:2023年04月19日10:00。关键词:低增益反馈,分数阶线性系统,Caputo分数阶导数,执行器饱和,半全局渐近镇定。

中国科学院自动化研究所召开2023年度青年思政工作会暨研究生代表座谈会(图)
2023年 青年思政 研究生代表
2023/5/22
为深入学习贯彻党的二十大精神,扎实做好新时代青年思想政治工作,2023年4月12日,自动化所组织召开2023年度青年思政工作会暨研究生代表座谈会,党委书记牟克雄出席会议,党办、教育处、团委负责同志及研究生代表共计20余人参加会议,会议由党办副主任吴丹主持。
2023年中国科学院自动化所普通博士招考综合能力考核通知
2023年 中国科学院自动化所 普通博士 能力考核
2023/5/22
如下各位考生,现将中国科学院自动化研究所普通博士招考综合能力考核等后续事项通知如下。
论文题目:分数阶时滞系统稳定性研究。答辩人:金晓创。时间:2023年04月13日14:00。关键词:分数阶,时滞系统,稳定性,李雅普诺夫,小增益定理。
上海交通大学自动化系博士生预答辩信息:王光明
机器人感知 机器人定位 自监督学习 高效点云学习
2023/5/10
论文题目:室外复杂场景下的移动机器人感知与定位。答辩人:王光明。时间:2023年04月06日13:30。关键词:机器人感知,机器人定位,自监督学习,高效点云学习。
论文题目:复杂海况下海洋机器人轨迹跟踪与异构协同交会控制研究。答辩人:贾泽华。时间:2023年04月05日14:30。关键词:自主水下潜器,自主水面艇,轨迹跟踪,协同控制,模型预测控制。
论文题目:面向多任务的无人船路径规划与控制。答辩人:胡智焕。时间:2023年04月05日14:30。关键词:无人船,路径规划,运动控制,避障,自动泊船。
论文题目:复杂任务下水面无人艇智能协同控制决策方法研究。答辩人:杜彬。时间:2023年04月05日14:30。关键词:无人艇,跟踪拦截,目标驱离,协同拖曳,任务分配,制导控制。
上海交通大学自动化系博士生预答辩信息:韩莉钧
柔性物体 视觉伺服 操作规划 操作控制
2023/5/10
论文题目:基于视觉的柔性物体操作研究。答辩人:韩莉钧。时间:2023年04月06日13:30。关键词:柔性物体,视觉伺服,操作规划,操作控制。

中国致公党中央委员会调研组来中国科学院自动化研究所调研(图)
调研 中国致公党中央委员会 中国科学院
2023/5/22
2023年3月29日下午,致公党中央组织部部长赵晓萍率队来中国科学院自动化研究所调研致公党代表人士队伍建设情况。院直属机关党委副书记刘京红,院直属机关党委组织统战部部长许冬,自动化所党委书记牟克雄出席活动。致公党北京市委常委、海淀区委副主委、致公党中科院基层委员会主委王亮主持活动。
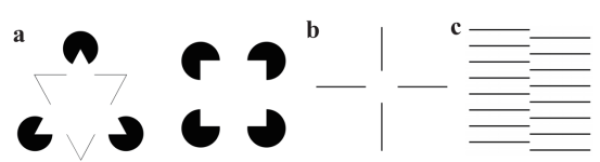
中国科学院自动化所揭示深度学习模型对幻觉轮廓“视而不见”(图)
自动化所 学习模型 幻觉轮廓 视而不见
2023/5/7
2023年3月30日,中国科学院自动化研究所研究员曾毅课题组基于人类和生物视觉系统中广泛存在的幻觉轮廓现象启发,提出了一种将机器学习视觉数据集转换成幻觉轮廓样本的方法,量化测量了当前的深度学习模型对幻觉轮廓识别能力。实验结果证明从经典的到最先进的深度神经网络均难以像人一样具有较好的幻觉轮廓识别能力。相关研究成果发表在Patterns上。

中国水产科学研究院渔业机械仪器研究所承担的国家重点研发计划 “筏式养殖海带自动化夹苗和机械化采收装备研发”通过课题绩效评价(图)
国家重点研发计划 筏式养殖海带 自动化夹苗 机械化采收
2023/12/20
2023年3月15日,国家重点研发计划“浅海生态增养殖机械化装备与模式”课题绩效评价会在山东青岛顺利召开。中国水产科学研究院渔业机械仪器研究所承担的“筏式养殖海带自动化夹苗和机械化采收装备研发(2019YFD0900804)”通过课题绩效评价。

中国科学院自动化研究所信息公开工作2022年度报告(图)
中国科学院自动化研究所 信息公开 2022年 年度报告
2023/5/22
根据《中华人民共和国政府信息公开条例》(以下简称《条例》)、《中国科学院信息公开工作管理办法》规定,现发布《中国科学院自动化研究所信息公开工作2022年度报告》。

杜 恒,性 别 :男,出生年月:1983年11月,系 别:机械电子工程系,学 位:博士,职 称:教授/博士生导师,职 务 院长助理,通讯地址:福建省福州市福州大学城乌龙江北大道2号福州大学机械学院 邮编:350108。
中国科学院声学研究所专利:一种用于声学多普勒流速剖面仪的自动化测试方法