
搜索结果: 1-15 共查到“知识库 机械工程 控制”相关记录349条 . 查询时间(1.665 秒)
大型合金钢锭及铸锻件缺陷与组织控制
大型 合金钢锭 铸锻件缺陷 组织控制
2023/8/19
该项目属材料与冶金领域,涉及重大工程钢铁材料、冶金与计算机模拟等学科。大型铸锻件是重大工程的核心部件,其制造能力是衡量一个国家工业水平的重要标志。大型合金钢锭和铸锻件尺寸规格大、凝固时间长、使役条件苛刻,导致缺陷预防难、组织控制难、加工成形难。由于中国装备和技术落后,三峡工程水轮机转轮铸件、核电压力容器锻件等曾长期依赖进口,受制于人。这种被动局面严重制约重大工程进展,甚至影响中国经济和国防安全。中...
江南大学机械工程学院过程装备与控制工程专业介绍
江南大学 过程装备 控制工程 专业介绍
2024/3/4
高端装备制造是“十四五”国家战略性新兴产业中的一个重要领域,是推动工业转型升级的引擎。过程工业是国民经济的支柱产业,是航空航天、深海探测、生物、医药、微电子、纳米材料等高新技术产业的基础。过程装备与控制工程专业以机械工程、控制科学与工程、能源与动力工程等多学科为基础,具有很强的综合性和实践性,是培育高端过程装备研发设计与成套应用高级人才的理想摇篮。过程装备与控制工程专业以机械工程、控制科学与工程、...
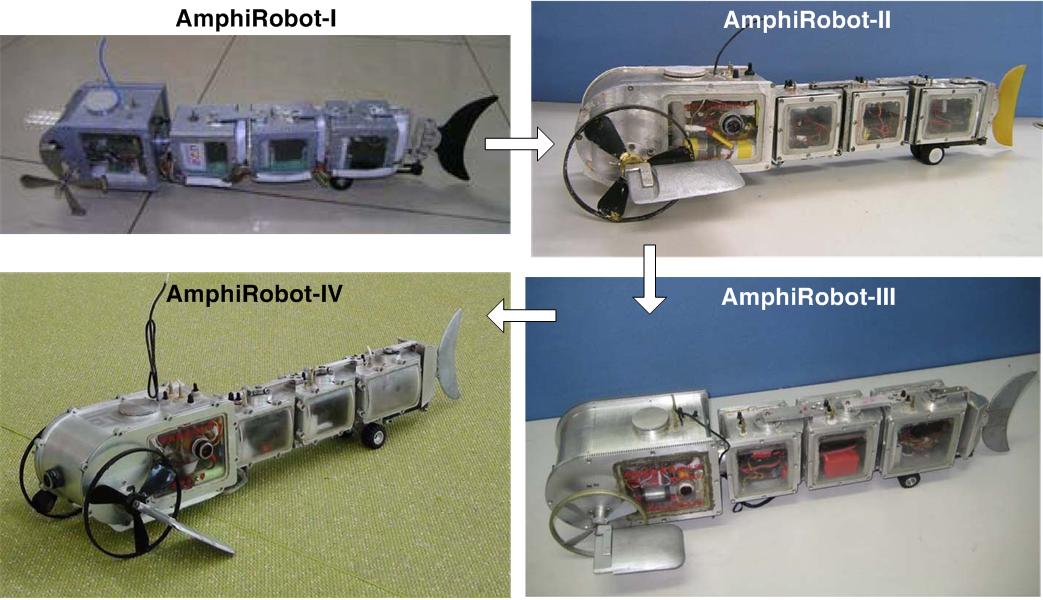
成果受到国家863项目“多模态仿生两栖机器人机构设计与运动控制 ”支持。通过机构创新和系统集成,以仿鱼推进技术为基础,辅以轮、桨、鳍一体化推进机构,研制具有快速游动性能、强大的环境感知功能及良好的水陆环境适应能力的两栖服务机器人。
针对水面机器人(unmanned surface vehicle, USV)航向跟踪容易受到风、浪与水流干扰影响的问题, 提出了一种基于线性变参(linear parameter varying, LPV)模型的H∞鲁棒航向跟踪控制器. 首先从水动力学机理出发, 提出了基于速度变参的LPV模型. 然后基于提出的速度变参LPV模型, 利用线性矩阵不等式设计了USV的H∞鲁棒航向控制器, 用以抵抗风、...
基于运动单元故障建模的装配可靠性控制技术
功能结构化分解 故障树分析 多色集合理论 装配可靠性
2019/3/8
为提高机电产品装配环节的可靠性,首先采用“功能―运动―动作”的结构化分解方法得到元动作单元,然后对产品历史故障数据进行分析以确定各运动单元的故障模式,并建立运动单元故障树;为提高分析效率,使用二元决策图(BDD)对故障树进行转化,得到故障树的最小割集,并根据基本事件的发生概率计算得到基本事件的重要度;然后根据80/20定律将重要度较高的事件确定为可靠性控制点,分析可靠性控制点故障的故障源,建立基于...
针对空间机器人遥操作过程中的通讯时延问题,提出一种改进的PD双边力反馈遥操作控制系统。首先从理论上推导该控制系统绝对稳定的条件。在保证系统稳定的前提下,进一步研究提高系统透明性的方法并给出控制参数的约束条件。通过与标准PD双边控制方法的对比实验以及固定时延与变时延2种不同条件下的仿真实验,验证该改进方法具有显著提高遥操作系统透明性和跟踪性能的作用。研究结果表明:所推导的稳定性条件和透明性分析结论进...
基于并联机构的车载担架及振动半主动控制研究
救护车担架 并联机构 磁流变阻尼器 半主动控制
2019/3/5
位于救护车车载担架上的卧姿人体,会承受来自路面的多维激励。为了对多维振动进行隔离,改进一种4-PUU并联机构作为车载担架的主体,并在移动副处安装弹簧与磁流变阻尼器,推导隔振系统的动力学与状态空间方程。磁流变阻尼器的可控阻尼力由LQR方法结合限界Hrovat半主动算法得到,研究担架系统在随机路面谱激励下振动半主动控制及隔振性能。研究结果表明:该担架系统能够有效隔离沿坐标轴的平移振动以及绕x轴的旋转振...
由于高维、非线性、欠驱动等特点, 3-D双足机器人的稳定性控制依然是一个研究难点. 一些传统的控制方法, 如基于事件的反馈控制方法和PD控制方法, 抗扰动能力较弱, 鲁棒性较差. 通过观察, 人类受到外部扰动影响时, 会通过调整步态重新获得稳定性,相较之下仅依靠一个步态获得的稳定性是有限的. 受此启发, 本文针对上述问题提出一种基于步态切换的欠驱动3-D双足机器人控制方法. 首先, 以能耗最少为优...
输出饱和多智能体系统的迭代学习趋同跟踪控制
多智能体系统(MAS) 迭代学习控制(ILC) 一致性 输出饱和
2018/7/17
针对带有输出饱和的多智能体系统有限时间趋同跟踪控制问题, 提出了一种分布式迭代学习控制算法. 首 先假设多智能体系统具有固定拓扑结构, 且仅有部分智能体可获取到期望轨迹信息. 基于输出约束条件构造一致性 跟踪误差, 在此基础上设计了P型迭代学习控制率. 然后采用压缩映射方法给出了一个算法收敛的充分条件, 并在 理论上证明了跟踪误差的收敛性. 最后, 将理论结果推广至具有随机切换拓扑结构的多智能体系...
熔化极气体保护焊中弧长系统的改进无模型自适应控制
熔化极气体保护焊 无模型自适应控制 非参数动态线性化 干扰观测器
2018/6/13
针对熔化极气体保护焊中电流与弧长非线性时变系统难以建立精确的模型,且在焊接过程中,系统存在各类不确定因素并易受到内外界扰动的问题,提出一种改进的无模型自适应控制方法。首先,设计了带有可测与不可测干扰以及不确定因素的动态线性化泛模型,采用参数估计算法在线估计伪偏导数,引入干扰观测器实时补偿逼近内外界扰动和不确定因素;
本文研究了一种基于PID的排种器电驱控制系统,取消了播种机采用地轮和链条驱动的方式,提高了播种机的播种质量和作业速度。采用PID算法控制排种盘转速,在目标转速与当前转速差异较大时,加入PID积分分离算法,以减少转速的超调量。通过整定后的PID参数为:Kp = 16、Ki = 0.05、Kd = 36,在其排种盘转速范围为0~24 r/min时,响应时间、超调量、稳态误差分别为0.4秒,1.56%和...
研究了动力吸振器对轮轨动力作用下浮置板轨道低频振动的控制特性。首先基于动力吸振器定点理论以及多自由度系统等价质量识别法,并通过对浮置板轨道进行模态分析,确定了浮置板附加动力吸振器的最优刚度、最优阻尼和最优附加位置;然后对浮置板轨道进行简谐响应分析,探讨了控制浮置板各阶模态振动的动力吸振器在不同质量比下的吸振特性;最后基于车辆-轨道耦合动力学模型,研究了列车动荷载作用下动力吸振器对浮置板轨道低频振动...
一种基于仿人智能的无模型自动跟踪控制算法
仿人智能 无模控制 自动跟踪算法
2016/12/16
为了解决复杂过程难于实施数学建模控制,探讨了一种基于仿人智能的无模型自动跟踪控制算法。文中指出了复杂过程控制中存在的问题,讨论了无模型控制的本质与无模型控制算法,基于仿人智能研究了人类对过程实施控制的流程,构造了一种启发式的自动跟踪控制算法。以二阶大滞后过程控制为例,实验仿真良好的跟踪曲线特性验证了该算法的优秀控制品质,表明文中所构建的无模型自动跟踪控制算法是可行与合理的。
水下球形探测机器人的有限时间点镇定控制
水下球形机器人 有限时间控制律 点镇定 输入变换
2017/12/1
介绍了水下球形探测器BYSQ-3的内部结构和工作原理,建立了水下球形探测机器人的运动学和动力学模型.利用微分同胚变换和控制输入变换对模型进行初步解耦,分解为2个子系统.其中第2个子系统为2个双积分器组成的级联系统,通过设计有限时间镇定控制律,可以保证部分状态在有限时间内收敛到0,并使整个系统较快地实现全局渐近稳定.整个过程无虚拟控制量,比传统的非线性设计方法更利于工程实现和节省能源.仿真和实验结果...
