
�������: 1-15 ���鵽�����ƿ�ѧ�뼼�� ����������ؼ�¼116�� . ��ѯʱ��(0.144 ��)
���ڽ������ص����������������������˻���Ⱥ��Ȼ����������֯���ϣ�ͼ��
���˻� �������������� ����֯����
2022/12/19
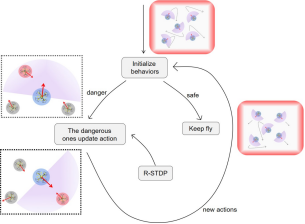
2022��10��28�գ��й���ѧԺ�Զ����о��������о�Ա��������Cell Pressϸ���������ڿ�Patterns�Ϸ�������Ϊ��Nature-inspired Self-organizing Collision Avoidance for Drone Swarm Based on Reward-modulated Spiking Neural Network�����о����ġ��Ŷ�����Ȼ�������OȺ�ֲ�...
�о�ʱ��������ϲ�������������ͬ���������⡣����������ŵ���ȶ������ۺ��ַ��̱Ƚ϶��������һ�ֻ��ڼ�Ъ�Ժ��ͺ�ЧӦ���ԵĿ����������ʱ��������ϲ�������������ͬ������������ֵģ�⣬�Ӷ���֤�������۽������Ч�ԡ�
�й���ѧԺ�Զ����о������������о�������������Թ���Ӱ��ʱ�����еĶ�߶Ⱦ���ѭ��������ģ��(ͼ)
������ ��߶Ⱦ��� ѭ��������ģ�� �������֢
2021/8/20
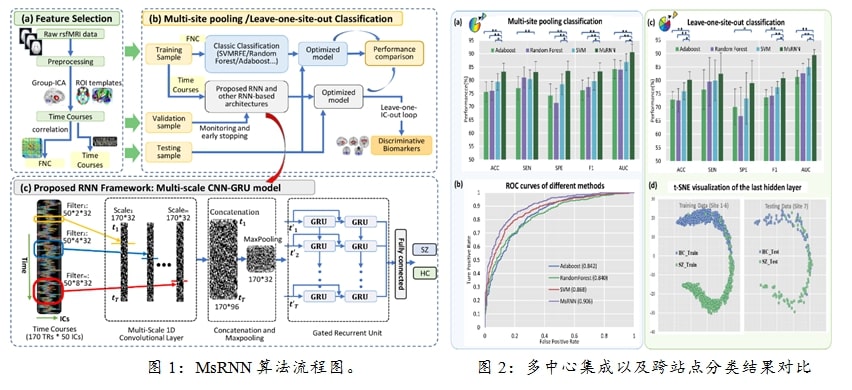
��Ϊһ�����ij����������ܴŹ���fMRI��ͨ�����Ѫ��Ũ�����ƶϴ��ԵĻ״̬������֪��ѧ�Լ������о��б��㷺Ӧ�á�����fMRIӰ�����ά�ȸߡ�����ȵ͵��ص㣬����fMRI���Լ�����������ͨ�����и�άС�������ص㣬���õĽ�������Dz�����ģ����߶����ɷַ����ȶ�ԭʼ��fMRI�������л��֣�Ȼ�������Ȥ������ռ�ɷֵ�ʱ���������ֵ��Time Courses, TCs���õ��Թ������Ӿ�����...
�ռ������˫�۲�����������̬�����������ԽӲ���һ�廯ELM����������
�ռ������ ˫�۲��� ����ϵͳ ��̬���� �����ԽӲ��� ELM������
2017/11/30
�����˿ռ������˫�۲�����������̬���������ԽӲ�����Э���������⣮���ȣ����ó����������ջ�Լ�����μ��˶�ѧ��������˲����������������ϵͳ�Ķ���ѧ���̣��������˻����ϵͳ�ܵ��ij��ЧӦ����Σ���Բ��������ϵͳ��̬�����˶��������ԽӲ������Ա��������ϵͳ����˻��ڼ���ѧϰ����ELM��������Ӧ���������Ʒ���������ѧϰ������ѧϰ�ٶȿ졢��������������Ȩֵ���ŵ㣬�����ڱƽ�ϵͳ��δ֪��...

���գ��й���ѧԺ�Զ����о������ѱ��������������о���Ա�ڿ�ѧԤӡ����վarxiv��Ԥ������һ���о��������һ������ʽ�ľ�����������������������������������µķ����ܹ�����������Ч�ʵ��µ����⡣����Ⱦ�����������CNN���У��������������������Ҫ��������о���Ա����������������״���������ɲ����������������ICNN�����봫ͳCNNʹ�ù�������ˣ���3x3����ͬ���÷���ѵ���˲�������ں���...
����BP�������ķ����۶�λ���㷨
��������̨ BP������ 3ά���� �ؽڿռ�
2017/12/1
Ϊ��ʵ�ַ�������̨���ӳ����ƶ�Ŀ��Ŀ��ٶ�λ���٣������һ��ͨ����������̨�����ؽڵ�����ת�����������ٵ�Ŀ������ʵʱά������̨��2����ҵ�����ʶ�����Ƶ�������ĵ��㷨��������ۺ�ͷ���Ľṹ�ص㣬�����һ������5����ת���ɶȵ�˫Ŀ��������̨��Ӧ��BP�����������������ⲿ����ʵʱ�仯��˫Ŀ3ά����������������У��������Ϲؽڿռ�����㷨�������̨������ת�ؽڵ�ת���Ƕȣ�ʵ�����У�����BP����...
���RBF �������Ľṹ�������, ���һ�ֻ���������жȷ�����Ҫ�ԵĽṹ�Ż��㷨. ����, ������������ڵ��������ж����������ϵķ����Ƿ���������������, �Դ���Ϊ�������ӻ�ɾ����Ӧ������ڵ�; Ȼ��,�Ե����������������������, ʹ�������и��õ���Ͼ��Ⱥ�������; ���, ����������Ż��㷨���з���ʵ��, �������, ��������㷨�ɸ����о���������Ӧ�ص���RBF �������ṹ, �������õı�...
�����������ķ綴������Ԥ����Ʒ����о�
�綴 Ԥ����� ������
2016/4/1
���2.4�����ٷ綴���������ƾ���Ҫ��ϸߵ����⣬��չ��������Ԥ����Ʒ����о�����������˻���������ģ�͵ķ綴������Ԥ����Ʋ��ԣ����õķ����ۺ���ģ��Ԥ����ƺ���������ģ���ŵ㣬���ڿ��Ʋ���δ֪�������Ժ�ʱ��ϵͳ���кܺõĴ���Ч��������������û��ھ����������������ģ����Ԥ��ϵͳδ���Ķ�̬��Ӧ����������������ģ�Ϳ�����ѵ�������в���ϵͳ�Ķ�̬���ԣ���������ģ��Ӧ�õ�ģ��Ԥ����ƣ�MP...
��Ա��ض�������仯����졢���������Ҳ�ȷ����ϵͳ,�����̶�������״̬�۲��� (ESO)���ڡ��ܺ��Ŷ�ұ���ƾ��Ƚ��͡�����Ч���ϲ������,�����һ�ֻ���BP ������������Ӧ�Կ��ſ�����(ADRC)����������������ӦESO ������,������ESO �Ľṹ,����BP ���������ߵ���ESO ���������������ӦESO Ƕ�뵽ADRC. ����������,�Ľ���ADRC �ϳ���ADRC �����Ŷ����ƾ��ȸ��ߡ�...
���Թؽ�-���Աۿռ�����˵�����������Ӧ���ݿ��Ƽ�˫������������
���Թؽ����Աۿռ������ ����ѧģ�� ��˹��������������� ���ݿ����㷨 �ؽ����Բ���������
2014/8/18
�ռ������ϵͳ��������Ҫ�����ڿռ�����˵ı۸˺����Ӹ��۸�֮��Ľ¹ؽڡ����ڿռ������ϵͳ�ṹ�ĸ����ԣ������о���Ա��ͬʱ�������Թؽں����Ա۵�ϵͳ��ע������Ϊ��̽���˲���δ֪���Թؽ�-���Աۿռ������ϵͳ�Ķ���ѧģ�⡢�켣���ٿ����㷨��ƺؽڡ��۸�˫�������������������⡣���ȣ����ö��嶯��ѧ��ģ���������Ư�����ռ�����˹��е��߶����ͽǶ����غ㶯��ѧ���ԣ��Ƶ���ϵͳ�Ķ���ѧ���̡��Դ�Ϊ����...
Ϊ��ϵ���������ѹ���Ĺ������ͣ��������·ϵͳ�İ�ȫ�ԣ������һ�ֻ���ģ�����Ƶ�BP������ģ�͡�����Ӧ������ɫ������������ѹ�������������庬�������֮��Ķ�Ӧ��ϵ��ȷ������������ѹ�������Ĺ������ͣ�Ȼ���ռ����ֹ����������ݣ���Ϊ��������ѵ���������ݺͲ������ݣ�������Ľ�BP�����������ģ�ͣ�ʵ�ֲ������ݵķ�֤���ԡ���Ͻ����������ģ���ڵ���������ѹ����������о������õ�ʵ��ǰ����
��Թ��ڵ糧��¯�¶ȿ���ϵͳ���ڴ���ԡ����ͺ�����ԣ�����RBF����������Դ�Իع�ģ��(RBF��ARX)���ϵķ������������ϵͳ�����Ż�������RBF��ARXģ�ͶԹ�¯�ķ������¶�ϵͳ���н�ģ�������봫ͳPID���ƺͻ��ھ����������������PID���ƽ��бȽϡ�Matlab��������������÷����ܹ�ʹϵͳ����ڽ϶�ʱ���ڴﵽƽ��״̬��ʹϵͳ�Ŀ������ܵõ���������ߡ�
���û���BP��������ȱ��ʶ���㷨���Ӳ�ͬʵ�������»�õ��ź������г�ȡ���������Ըָ��в�ͬ��Ⱥ�λ�õľ������ƽ�����ʶ�����ȣ�����Ƶ��Ϊ235kHz������Գ�����ģ̬�����Ըָ��еľ������ƽ����˼�⡣ʵ���������235kHzʱ��õij��������źź��ϵ�һ��L(0,2)ģ̬����������L(0,1)ģ̬���С�ߴ�ȱ��ʱ����������������⣬�ּ���������Գ�����߽�ģ̬���ȱ��ʱģ̬�϶�ֱ�ȱ�ݻز���...
�������ݶ��¶ȱȽ����У������¶��������ƫƯ���ǹ������ݹ������������������е�һ�ֽϴ�������Ϊ�˼�С���������������̵���ƫƯ�ơ���������ʱ�䣬����˶Թ��������������̽��в����ķ������÷����Թ��������¶Ⱥ��¶ȱ仯��Ϊ���롢��������Ư��Ϊ������������뵥�����RBF�����������������������̲������������¶�ij�ͺŹ�����������Ư�ƽ����˲����������������÷�������Ч��С���ݵ������¶�Ư�ƣ���������...
ˮ�����������ֻ�ɫϵͳ���и��ӵķ����ԡ��ۺ�������Ⱥ��ɫGM(1,1,��)Ԥ��ģ�ͺ�RBF������Ԥ��ģ�͵��ص㣬��������Ⱥ��ɫRBF���������Ԥ��ģ�͡�����14���ˮ����������Ԥ��������ó���Ⱥ��ɫ������ģ�͵�Ԥ�⾫�ȸߴ�96.77%����֤��Ԥ��ģ�͵���Ч�ԡ�
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...