
�������: 1-15 ���鵽�����ƿ�ѧ�뼼�� ��������������ؼ�¼60�� . ��ѯʱ��(0.182 ��)
�й���ѧԺ�����Ƚ������о�Ժר���������ɶ�����������
�й���ѧԺ�����Ƚ������о�Ժ ר�� �����ɶ� ����������
2023/11/28
�й���ѧԺ�����Ƚ������о�Ժר���������ɶ�����������
�������������Ĵ���,������������������ϵͳ�涯��ѧģ�ʹ���������ɸ��������켣�Ŀ������ؽ�,��ʹ�������������й����о�����ɸ������������.��ʵ�ֹǿ��������İ�ȫ���ٿ�ΪĿ��,����˻��ڱ��迹���Ƶ���������������������Ŀ�������Ż�����.����,����֧���ֽⷨ���������������������Ķ���ѧ���н�ģ��

�й���ѧԺ�������ϼ����빤���о��������ɶ������������о�ȡ�ý�չ��ͼ��
�й���ѧԺ�������ϼ����빤���о��� �����ɶ� ����������
2017/12/27
�й���ѧԺ�������ϼ����빤���о����Ƚ����켼���о��������˶����Ƚ��������Ŷ������з��ĸ��ٸ߾��������������������3T1R������ƽ��һ��ת�����ĸ����ɶȵ��˶���ʵ���������ɶ������������Ĺ��ʹ��¡��ڻ�����������ϣ������˶��ص�M��4-2-1��������������ƣ��ṹ���պá����ĵͣ���Ч�����ϵͳ�ĸնȺ��ȶ��ԡ��о��Ŷ�ͨ�������˶�ѧ���Է��������ָû������м�����������˶�ѧ����㷨������������ϣ�...
�й���ѧԺ�������ϼ����빤���о��������ɶ������������о�ȡ�ý�չ��ͼ��
�й���ѧԺ�������ϼ����빤���о��� �����ɶ� ����������
2017/12/18
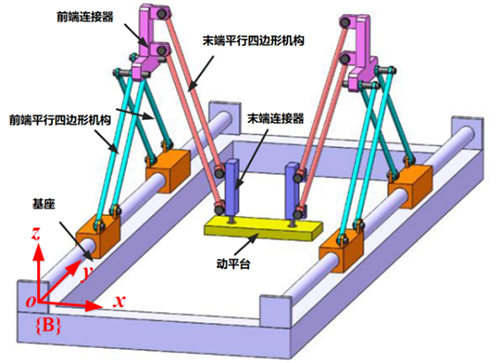
�й���ѧԺ�������ϼ����빤���о����Ƚ����켼���о��������˶����Ƚ��������Ŷ�������Ƶ������ɶ�����������������ʵ��3T1R�ĸ����ɶȵ��˶����������ɶ������������Ĵ������֮һ������Ҫ�ص�Ϊ2����֧ͬ��ͨ������ת�������ӵ���ƽ̨�ϣ���ÿ��֧����2����ͬ��֧ͨ����װ�ڻ����ϵ��ƶ�����Ϊ������Ϊ��һ�����������ص㣬��������������֤�˸û������ɶȵ���Ŀ���������˶�ѧ���ԣ��õ�����λ�õķ�ս⣬���ݻ�������...
Ϊ�о���������������֧�����ڹؽڿռ��ڵĶ���ѧ������ԣ����ȣ�������һ���������������ڹؽڿռ�Ķ���ѧģ�ͣ������˶���ѧ������ط����������˶���ѧ���ǿ��ϵ������ϵ��������һ����������������ѧ��������������Ҿ���ͳһ��ȣ�Ȼ����һ��2��3HUS+S������������Ϊ�������ڶ���ѧ���ǿ��ϵ�������˶���ѧ������Է������õ��˶���ѧ��������������˶��켣�ڵı仯���ɣ������ʵ����������֧����ʵ�������...
�������������ϵͳ�����Ľṹ�ص㣬������ռ������һ�ַ���������Ӧ���Ʒ���. �����е�����Ӧ��
�Ʒ�����ȣ����ڳ�ֿ����˹��Ծ����в������ص㣬������в��ٲ�ȡģ�͵IJ�ȷ���������Ի��ı任��
�����ɼ�����Ӧ�ɵ����Ҳ�������ļ��ٱ�ý�Ϊ��. ����Lyapunov����������ϵͳ�ȶ��Բ���
����ϵͳ�ȶ�������. �÷����ܹ���֤ϵͳ���ն�λ�ü��ٶȵ�ȫ�ֽ����ȶ�. ���������֤�˸�
...
������ǣ�������������о��У������������Ƚ϶̴�ཫ�䴦���ɽ���������ֱ������Ԫ��û�п����������ȵ�Ӱ�죬�նȷ������������֧��������������ͬ��Ϊ���Ǵ���Ӱ�죬���IJ��������߷��̽����˴��������ľ���ѧģ�ͣ��Ƶ��������ĸնȾ���Ȼ�������һ�ָնȵ�Чģ�ͣ���������ЧΪ�����������ֱ�ĵ��ɡ����DZ�ɽ���ǣ��������������ЧΪ����֧���������������Ӷ��������еĸնȷ������ۼ�����ɴ�����ǣ���������ĸ�...
Ϊʵ�ֹ�ѧ���ܵ��������Ƴ����ɽ����ŷ����������6-HTRT������������������6�����ɶȣ���ṹ�ص�����˸�������������ɸ߾��ȶ�λ��������������������λ����⣬���Բ�ͬλ���µĹ����ռ�����˷��档����ϵͳ���û���ISA���ߵıջ����Ʒ�ʽ�����Խ����ʾ�������������������ռ�ϴֱ��ʸߡ��ظ���λ���ȸߣ�˵���������ṹ�Ϳ���ϵͳ��Ƶĺ����ԡ����Ӧ�ô������������ɹ�����˹�ѧ����װ�����顣
����һ�ֻ����Ӿ�������������λ�˼��ϵͳ��ܣ�����ͼ��ɼ���ͼ������λ�˼�⡢��������4�����֡�ʹ�õ�Ŀ����ͷ�ɼ�ͼ���Զ����ɶ�����������Ϊ���ƶ�������Haar������ȡ��Ŀ����дָ��١���һ�����Ŀ�����ض��ļ��������㣬����ƽ�в�����ԭ�����õ�������ĩ�˲�������ʵ��λ�˲�����ͨ����������������˶�ѧ���̣��õ�����Ŀ��Ʋ�����ʵ��ͷ�����֤�˸�ϵͳ�Ŀ����ԡ�
6-DOF����������λ�������ʵ�ýⷨ
���������� ����� ����
2009/7/27
��6-DOF������������λ������������о��ͷ�����ͨ��λ�÷�������˼·����λ����������⡣������ƽ̨ͳһ��һ������ϵ�¡����տռ�����������㹫ʽ����6���˵��쳤ֵΪ��֪����λ�˲���Ϊδ֪������������6���˵IJ������̡�ͨ�����������λ�˲������ص�֮һ��δ֪�������٣����㾫�ȸߣ���һ�ص��Ǵ�ʵ�ֵĽǶ���������ʵ����ǿ��ͨ��ʵ����֤��˼·���㼴ʱ���Ƶ�Ҫ��
��Դ������Զ���ֵ�ϵͳ�ķ����ԡ����ͺ��������Լ��������ŵ��ص㣬�����һ����Դ�켣���ٵĻ�ģ���Ʋ��ԣ� �÷���ͨ���ֽμ���ָ�������������ӿ�ϵͳ����Ӧ��ͬʱ����ģ��������ʵʱ������ģ���Ƶ������ɲ�����������֤�˿���ϵͳ�Ŀ����Ժ�³���ԣ������ܹ���Ч�����Ʋ�����
���÷�����������ʽ,�����˶�ѧ��⣬ͨ���Ŵ��㷨���Levenberg �� Marquardtѵ����������ʵ��������λ�ôӹؽڱ����ռ䵽���������ռ�ķ�����ӳ�䣬�Ӷ���������������˶�ѧ�������ֵ��Ȼ��ͨ����ţ�ٵ����������þ�ȷ�⣬���˷���Ӧ����6��PRRS����������������������÷������㾫�ȸߣ���ʱ�٣���Ӧ��������������������ռ�ʵʱ���ƻ���������������Ĺ����ռ䡣
�����������ۺ�ָ�������������6��PRRS�������������ؽ��뱻���ؽڵ�λ����⡣���ݸ������������������ӳ���ϵ���Ƶ���һ�ֻ����ٶ�ͶӰ���ſɱȾ�����ⷽ�������һ�ֽ������6��PRRS�����������涯��ѧ�����ϵͳ����������Lagrange�����������������ĸ��嶯��ѧ��ϵ��Ӧ���鹦ԭ�����ջ�ö���ѧģ�͡������6��PRSS����������һϵ���˶�ѧ�Ͷ���ѧ���⣬��Щ��������һ����ͨ���ԣ���������������...
��Դ������Զ���ֵ�ϵͳ�ķ����ԡ����ͺ��������Լ��������ŵ��ص㣬�����һ����Դ�켣���ٵĻ�ģ���Ʋ��ԣ� �÷���ͨ���ֽμ���ָ�������������ӿ�ϵͳ����Ӧ��ͬʱ����ģ��������ʵʱ������ģ���Ƶ������ɲ�����������֤�˿���ϵͳ�Ŀ����Ժ�³���ԣ������ܹ���Ч�����Ʋ�����
�������Զ��(LT)��Դ����֧��ϵͳ����Ϊһ����������������(WDPR)��������Դ����֧��ϵͳ�ķ�������ѧģ�ͣ�������������º�����Լ��������ȷ����WDPR�Ŀɴ﹤���ռ䣮����������������Ԫ�������������þ��ն������С����ֵ�����۸��������ĸն����ܣ�ͨ����LT50m WDPR����ģ�͵Ŀռ��˶���ֵ���棬��������ά�ɴ﹤���ռ�ͼ�μ��ն����森�����������������Լ��������LT�ɴ﹤���ռ�Ӱ�����WD...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...