
搜索结果: 1-15 共查到“知识库 控制科学与技术 系统”相关记录1948条 . 查询时间(1.284 秒)
非线性系统自适应最优切换控制方法
非线性系统 切换控制 自适应最优控制 嵌入转换
2024/1/16
针对具有未知动态和M个平衡点的连续时间非线性系统,将线性自适应最优切换控制器和未建模动态补偿器相结合,基于嵌入转换技术和近似动态规划思想,提出一种自适应最优切换控制方法.首先在非线性系统的M个平衡点建立M个线性化模型,当模型参数已知时,提出由线性最优切换控制器、切换准则、未建模动态补偿器以及非线性系统组成的控制系统结构。
非匹配不确定MIMO系统的分数阶终端滑模控制
滑模控制 终端滑模 分数阶滑模 非连续控制
2024/1/16
针对一类非匹配不确定多输入多输出(Multi-input multi-output,MIMO)系统提出一种分数阶终端滑模控制(Fractional-order terminal sliding-mode,FOTSM)策略,使系统输出收敛到零而非其邻域.该方法解除传统反步法控制律设计中,虚拟控制增益右伪逆矩阵必须存在的严苛限制;对系统不确定性的假设不局限于慢时变和H2范数有界型扰动,分析控制增益存在...
基于黎曼度量的一类反馈控制系统性能监测与诊断
性能监测 黎曼度量 性能诊断 故障定位
2024/1/16
针对复杂工业系统对性能衰退的容忍度低等问题,提出基于系统性能预测的一类反馈控制系统过程监测方法,通过黎曼度量对控制性能衰退程度进行预测与监测,并给出发生故障的类型,以提升过程监测系统的实时性与准确性.首先,利用系统的实时数据,计算系统性能衰退的预测指标;其次,利用黎曼度量对系统性能衰退程度进行预测与监测,并利用随机算法给出对应的阈值来诊断系统性能衰退;最后,通过计算各类引发系统性能衰退的故障的性能...

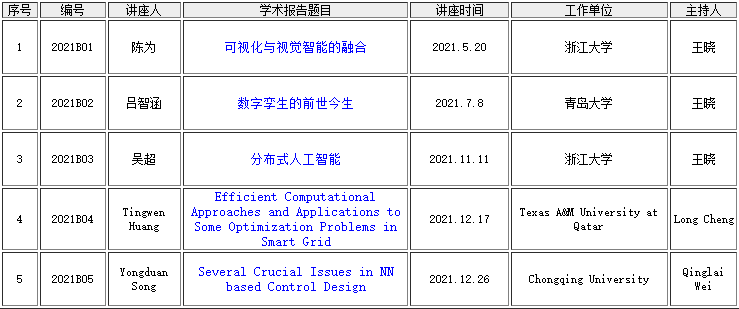
中国科学院自动化研究所复杂系统管理与控制国家重点实验室2021年系列讲座。

中国科学院自动化研究所复杂系统管理与控制国家重点实验室2022年系列讲座。
路网约束下异构机器人系统路径规划方法
异构机器人系统 路径规划 路网约束 两步法
2024/1/17
由无人机(Unmanned aerial vehicles,UAV)和地面移动机器人组成的异构机器人系统在协作执行任务时,可以充分发挥两类机器人各自的优势.无人机运动灵活,但通常续航能力有限;地面机器人载荷多,适合作为无人机的着陆平台和移动补给站,但运动受路网约束.本文研究这类异构机器人系统协作路径规划问题.为了降低完成任务的时间代价,提出一种由蚁群算法(Ant colony optimizati...
压缩空气泡沫灭火系统(CAFS)经验证可作为特高压换流变灭火方案,正在国网公司特高压换流站推广应用。本文结合国网公司典型±800 kV特高压换流站项目,提出特高压换流站CAFS联动控制系统的功能配置、工作流程、外部系统接口方案,对后续特高压换流站CAFS联动控制系统的设计、应用具有借鉴作用。
大型生产设施的安全与能效监控,迫切需要低功耗、高精度的泛在感知,高实时、高可靠的无线传输以及动态灵活的生产管控.为此,本文首先提出一种扁平架构的无线化工业控制系统.然后,围绕感知、传输和控制等核心功能需求,系统阐述了高实时高可靠的工业无线网络设计及其时−空−频三元联合调控方法,感知终端的变周期精益采样和高能效精准时间同步方法,以及管控平台的语义化互操作和赋时工作流模型等核心...