
�������: 1-15 ���鵽����е���� ��е������ؼ�¼39�� . ��ѯʱ��(0.065 ��)
�й���ѧԺ�����Ƚ������о�Ժר����ȡ������е��
�й���ѧԺ�Ϸ����ʿ�ѧ�о�Ժר�����ɵ��˲����Ķ���ֱ��������е��
�й���ѧԺ�Ϸ����ʿ�ѧ�о�Ժ ר�� ���˲��� ����ֱ�� ������е��
2023/11/15
�й���ѧԺ�Ϸ����ʿ�ѧ�о�Ժר�����ɵ��˲����Ķ���ֱ��������е��

���գ��й���ѧԺ�����Զ����о����ռ���е�������о�ȡ�����½�չ��ΪӦ����Ƭ������ڹ���װ������ȸ��ӿռ��������ŶӴ����Ե����Ƴ�һ��1U�ߴ磨10cm*10cm*10cm���Ŀ�չ���ռ������Cubot������о��ɹ��Է�����ʽ��������Space: Science & Technology�ϡ�

2023��4��28�գ��й���ѧԺ�����Զ����о����ռ���е�������о�ȡ�����½�չ��ΪӦ����Ƭ������ڹ���װ������ȸ��ӿռ��������ŶӴ����Ե����Ƴ�һ��1U�ߴ磨10cm*10cm*10cm���Ŀ�չ���ռ������Cubot������о��ɹ��Է�����ʽ��������Space: Science & Technology�ϡ�
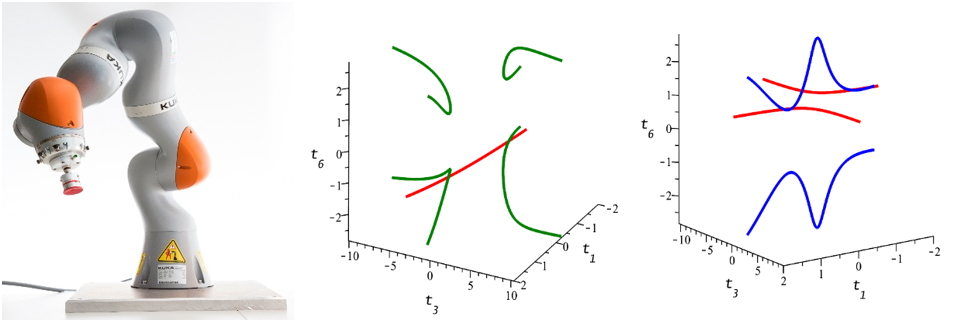
��е����ĿǰӦ�����Ĺ�ҵ�����ˡ�������е����һ����������������˻������Ĺ�ҵ��е�������˶�ѧ���������������ǻ����˿��ƹ����еĻ������⡣��ѧ��е��ʵ�������ӼѸ��о�Ա��µ����ǰ����о�����Hofbaur���ڵ��˺�����������һ��������е�����˶�ѧ������ı���ʽ�⡣��������Gr��bner���ȹ��߸������꾡����е���˶������Է�������ع����������˶����ڿ�IEEE Transactions on R...

�й���ѧԺ�Ϸ����ʿ�ѧ���Ŷ������������������е���Ķ�̬���Է������˶������о�����ȡ�ý�չ��ͼ��
��е�� ��̬���Է��� ����������
2023/7/23
2022��10��9�գ��п�Ժ�Ϸ��о�Ժ����������װ�����������о���ң���������������������������е���Ķ�̬���Է������˶������о�������ȡ����һ����չ���о��ɹ��������п�Ժһ��TOP�ڿ�Applied Mathematical Modelling�ϡ�

�й���ѧԺ������ѧ������е�������о�������������ҵ��ѧ�������Ƶ���е��ת�Ӽ���������װ�ò���ɹ���װ��ͼ��
��е��ת�Ӽ� ����װ�ò��ⰲװ �й��ռ�վ
2022/4/22
2021��11��7������13�ų����־�ա�����ƽ��Ҷ�⸻���й��ռ�վ��Ͳ�������ϣ��ɹ���ɴ�С��е����ת�Ӽ���������װ�õİ�װ����ɰ�װ��ת�Ӽ���������װ���Ͼ�����������˫����Ϲ���������װ����ת�Ӽ��IJ���ͣ��װ�ã����й���ѧԺ������ѧ������е�������о����������������ơ�ת�Ӽ��Ǵ�С����Ϲ����ļ����豸��ͨ��ת�Ӽ��ļ�������С��е���ܳ��ȴﵽ14.5m��ת�Ӽ���Ϊ�����������С�������������֣�...
������ҵ��ѧ�о���Ա��Cell Reports Physical Science����������е������о��ɹ���ͼ��
������ҵ��ѧ Cell Reports Physical Science �����е�� ���������
2021/10/13
������������������ˡ����о���Ѹ�ٳ�Ϊѧ����һ�����ܹ�ע���ȵ��������������(Soft Robotics)��һ��ȫ�µ���еϵͳ���ڶ��������о��м����Ӧ��ǰ�������գ�������ҵ��ѧ�ž�ʫ��������������ͨ��ѧ������������ѧ���廪��ѧ�Լ���۳��д�ѧ���о���Ա�����������һ�ֿ����������ε�������е�������������խ�����Ļ����е��������Ҿ߱��նȿɵ���������˺��˶����ŵȹ�����ȷ���ڲ�����������е����λ...
Ϊ�������������(automated guided vehicle��AGV)����ʵ���ڲ�ͬ¥�������������������⣬��ơ�����һ���䱸������е����AGV��������������������巽����ơ���е�ṹ��ơ��˶�����ģ��Ͱ�ťʶ��ģ���Ӳ�����������ƣ�������е�����˶�ѧ���������������������������е��ݰ�ť�Զ�ʶ���밴ѹ����ʵ�顣ʵ������������AGV �ܸ��ݳ�����������¥����Ҫ�����е��ݰ�ť���Զ�ʶ����...
����ճ������ж��ϰ��ﻷ���µķ����������е���켣�滮���⣬�����һ���˻�Э���µĹ켣�������������������ȣ����ڶ�̬������Ԫ��DMP��ģ�ͣ������һ����������ʾ�̹켣��״���Ƶ�·���ķ������÷�����Զ����ɶ���ϲ����Ĺ켣��״�������⣬ͨ����3άĿ���ͶӰ��ʾ�̹켣ƽ�棬�������������ת��ʽ����3ά·������֤�����ɹ켣�ڸ��������н��ȶ�����״��������Σ���Դ��ڶ�����״�ϰ���ĸ��Ӳ�����������...
������Թؽڿռ�����˵���ģ�⼰�ռ�Ӧ���ܵ�������������ȷ������ŵ����⣬���һ�ֻ��������㶯������ռ�����������Ӧ�����㷨�����Ƚ����˿�������Ӱ������Թؽڿռ�����˵�ģ�ͣ�ͨ�������㶯������ϵͳ���״�����ת��������ռ���п���������ƣ���������������Ӧ�㷨��ϵͳ�IJ�ȷ���Խ��бƽ�������Աƽ���������³���������������������ת��Ϊ�ؽڿռ�Ŀ������ء���ϵͳ�������ȶ��Է����ͷ���У��...
��Ի��ڵ�˿���صĿռ���е��������ģ��ϵͳ�������������⣬�����ж���ʡ�ָ�꣬�о����ϵͳģ�⾫�ȺͿɿ��ԵĸĽ����������ȣ�����С���μ�������Ե���ԭ�����ڿ��� 2 ά�涯ϵͳ����λ�����͵���������������£��ֱ�����۸˸���Ӧ���������Ť���ϱ��Σ�Ȼ������������������Ӧ�������Թ�ϵ������õ����������Ա۸˸���Ӧ���ġ�Ӱ��ȡ�������嵥��������ж���ʡ���������ģ��װ�á���ж���ʡ���...
��е�������ڽ�ͧ����װ�������Ӧ��
����װ�� ��е�� ��ͧ���� Ӧ�÷���
2015/11/3
���ͨ�ô�ֱ����װ����ִ�з�������ʱ���ڿռ���ա��������ӵ�ԭ�����˹��������⣬�����������е������ʵ�����������ķ��������Աȷ�������������С�ռ��������е�����Ʒ����������˷���װ��������е��ϵͳ��ƵĹؼ�Ҫ�أ�����Ŀǰ����װ������2~3���ɶȵ���е����ʵ�ֵ����Ѳ�IJ�β������临�Ӳ�������Ϊδ�����ͷ���װ�õ��Ż�����ṩ��������
�����е���ؽڶ���������е��ĩ�˶�λ����Ӱ������о�����6���ɶ���е��Ϊ�о���������D-H����������е���˶�ѧģ�ͣ�����������������ѧģ�͡��������ؿ��巽����MATLABΪƽ̨���������ֲ�����ʵ�飬�ó������ڶ�������������е��ĩ�˶�λ���ֲ��ص㣬�Լ��ڲ�ͬ�������ȼ��£���е��ĩ�˶�λ�����ʷֲ������Ϊ������������ṩ�˲ο�������ͬʱΪ��е����λ���������ṩ�˶��������ݡ���
��Lagrange���̺ͼ���ģ̬�����Ͻ����˿��ǹؽڴ�Ħ����˫����������е���Ķ���ѧģ�͡�����������ص�Ӱ��,��������ӷ��Ĵ�����ʽ���������Ӧ�淨��,���һ�ִ������������������˫����������е��ϵͳ�ɿ��Է�������,���ֱ�����ϵͳǿ�ȡ��նȺ��˶����ܵĹ��ܺ�����ͨ��������֤�˸���ģ�ͺͷ����ĺ����ԺͿ�����,ͬʱԤ����ϵͳ�Ŀɿ��ȡ��о��������,ͬ�ɿ��Է�����Monte-Carlo�����,�÷���...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...