
搜索结果: 1-15 共查到“信息科学与系统科学 机器人”相关记录50条 . 查询时间(0.216 秒)

“智新杯”全国人工智能机器人创新大赛颁奖典礼在京举行(图)
智新杯 人工智能 机器人 颁奖典礼
2023/11/12
2023年8月16日,“智新杯”全国人工智能机器人创新大赛颁奖典礼在京举行。本次活动由中国人工智能学会(CAAI)主办、CAAI人工智能基础专委会承办、国际信息研究学会协办。

镉是我国农田土壤污染的首要污染物,威胁农产品质量安全。稻米是我国人群膳食镉摄入的最主要来源。大尺度的土壤与稻米协同采样调查发现,稻米镉与土壤镉以及土壤性质间的量化关系较差(R2通常低于0.2),时常存在“土壤镉超标而稻米不超标,或土壤镉不超标但稻米超标”的现象,这给污染耕地质量类别划分和风险评估带来很大的不确定性。
相比于传统的刚性驱动器,串联弹性驱动器(Series elastic actuator,SEA)具有被动柔顺性、阻抗低、抗冲击、力感知等诸多优点,因而已被广泛应用于各种机器人系统中.首先根据弹性和阻尼特性将串联弹性驱动器分为弹性型、阻尼型和弹性−阻尼型串联弹性驱动器,介绍不同类型串联弹性驱动器的优缺点,并详细概述弹性和阻尼特性的机械实现方式;然后对各类串联弹性驱动器作为力传感器的建模方...

北京大学信息科学技术学院电子学系雷易鸣、北京大学第三医院妇产科郭红燕与合作者在基于机器学习辅助的人类卵巢癌耐药性预测方法研究领域取得重要进展(图)
基因相互作用 蛋白质结构 基因测序技术 信息领域 人类卵巢癌耐药性
2021/9/1
基因相互作用是指个体基因与其他基因共同影响蛋白质结构和生物学过程的现象,对于揭示基因及其对应蛋白质之间的功能关系有着重要作用。在复杂疾病的基因研究中,基因相互作用一直以来都是较大的难点。在基因测序技术快速发展的今天,如何利用有限样本数量对化疗耐药性和大量基因之间定量关系进行准确预测,不但是临床医生关注的重要问题,也成为医学和信息领域交叉研究的重要课题。

自然界中许多生物会自组织涌现出壮观的集群运动。而基于集群机器人控制实现高效且可靠的集群行为是一项具有挑战性的课题。首先,实现多机器人系统分布式控制需要复杂的算法控制、高精度的传感器和足够的驱动。其次,现有的集群模型都基本受到Vicsek模型的影响,强烈地依赖于对齐规则。而对齐规则要求个体需要邻居的方向信息,这提高了对每个个体感知能力的要求。此外,对齐规则的强依赖性会导致群体在宏观上涌现行为的单一性...
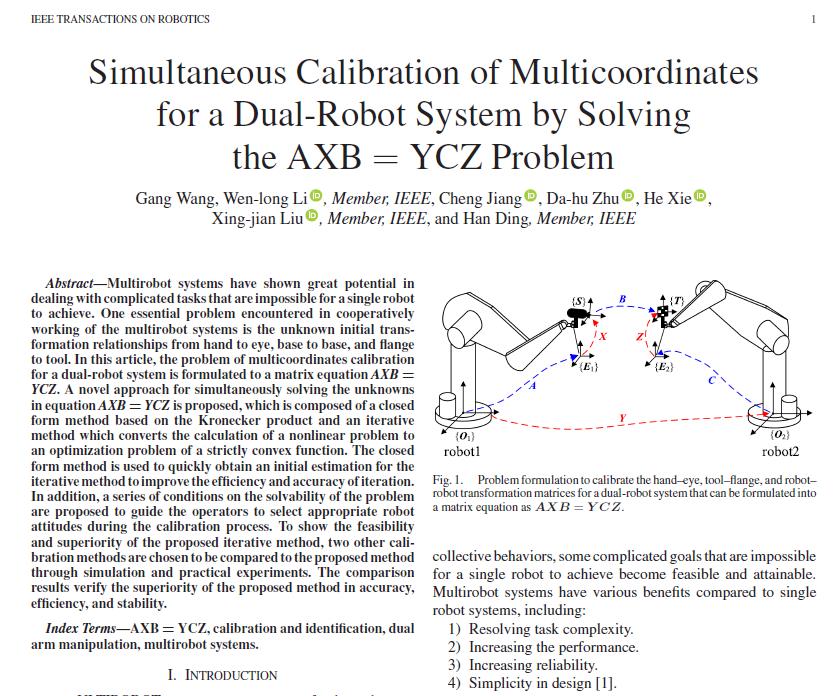
新闻网讯(通讯员 王刚 李文龙)2021年1月13日,机器人领域顶级期刊IEEE Transactions on Robotics在线刊登了机械学院数字制造装备与技术国家重点实验室李文龙教授和丁汉院士团队多机器人系统精确标定的最新研究成果“Simultaneous calibration of multi-coordinates for a dual-robot system by solving...

Stokes-Einstein(SE)关系的失效是液体玻璃化转变过程中的特征动力学行为之一,其背后的物理机制一直是凝聚态和非平衡统计领域近些年的热议话题。研究表明,在液体玻璃化过程中,玻璃转变点附近异常缓慢的动力学行为,以及实验系统中可能的微小晶粒析出相都有可能对体系扩散系数与弛豫时间(或黏滞系数)之间的耦合关系产生影响;这种扩散系数与弛豫时间之间的退耦合现象也可从热力学的角度加以理解,例如在相空...
新一代人工智能技术的快速发展,有力推动着机器人技术进入了传统的建筑领域。建筑机器人的服务范围包括建筑物全生命周期所涉及的各个阶段(勘测、营建、运维、破拆、保护等),为解决建筑领域若干瓶颈问题提供了可行的途径。为促进建筑机器人及建筑智能化技术的发展,中国自动化学会建筑机器人专业委员会组织召开第四届中国建筑机器人技术大会,以促进各相关行业的交流,加强机器人产、学、研协作,推动建筑机器人技术及产业的发展...
蜂群优化算法的机器人路径规划
人工蜂群算法 梯度下降算法 Bootstrap采样 路径规划 自适应
2020/9/7
提出了一种改进人工蜂群算法用于机器人的路径规划。为了防止算法早熟,基于梯度下降算法的思想对蜜源位置更新公式进行了改进,同时在公式中引入了自适应位置更新系数。以上述改进公式为基础,基于Bootstrap采样策略,对引领蜂和观察蜂各自的种群进行重采样,以提高算法收敛速度。在部分标准测试函数上对所提算法进行了有效性验证,结果表明所提算法较以往的蜂群算法具有更高的收敛速度,且收敛精度提高。将所提算法与改进...
基于排队论的智能仓库机器人数量需求分析
排队论 智能仓库 搬运机器人 数量需求分析
2020/7/16
基于排队论理论,将智能仓库机器人数量需求问题抽象为多服务台排队问题,综合考虑订单数量、拣选效率以及机器人购置成本等因素,建立了智能仓库机器人数量需求分析模型。通过分析系统的平均队长、订单的平均逗留时间等指标,并计算模型目标函数,可得考虑拣选效率和拣选成本等因素下的最优机器人数量配置。通过对智能仓库中机器人数量需求分析,既满足订单的拣选需求,避免因为等待时间过长而造成的成本增加;同时,保证每台机器人...
提出了基于大数据和机器学习的智能作战评估方法和框架,重点对评估指标智能构建、基于时序的作战网络评估分析、基于大数据的体系评估视图构建、装备贡献率多维度评估分析等关键技术进行了研究,为开展智能化作战评估提供新的解决方案。
针对复杂海流环境下自治水下机器人(AUV)的路径规划问题, 本文在栅格地图的基础上给出了一种基于GBNN(Glasius biological inspired neural networks)模型的新型自主启发式路径规划和安全避障算法, 并考虑海流对路径规划的影响. 首先建立GBNN模型, 利用此模型表示AUV 的工作环境, 神经网络中的每一个神经元与栅格地图中的位置单元一一对应; 其次, 根据...
基于概率分布区间的纳米操作机器人路径规划
路径规划 邻接矩阵 蚁群算法 路标配置
2019/3/14
在原子力显微镜(atomic force microscopy, AFM)机器人化纳米操作中, 由于探针在任务空间中位置不确定性 随着时间和探针移动的增加而逐渐增大, 使得探针无法精确定位, 导致纳米操作效率低下. 针对此问题, 本文参考宏观 机器人利用路标定位的策略, 提出基于概率分布区间的探针路径规划方法, 在分析路标观测中探针定位精度的基础上, 通过定义概率分布区间规划探针扫描路径以及观测距...