
搜索结果: 1-15 共查到“知识库 机械工程 设计”相关记录442条 . 查询时间(3.213 秒)

南方科技大学机械与能源工程系科研方向创新设计与先进制造(图)
南方科技大学机械与能源工程系 科研方向 创新设计 先进制造
2022/10/23
智能制造是我国在《国家十三五规划纲要》中明确提出的重点发展技术领域之一,也是《中国制造2025》行动计划提出的重点发展领域之一。智能制造技术通过对信息通信、人工智能、纳米和新材料、大数据和物联网等先进技术的开发创新,实现产品设计、制造、装配、运行、维护全寿命周期的数字化、智能化、互联化,从而提升高端装备精度、效率以及可靠性,减少能源和原材料消耗,降低制造业碳排放。
智能制造与装备方向围绕多感知融合智能制造-检测一体化装备的基本理论与集成,实现复杂场景下的智能化、无人化,研究多传感器融合检测、数字信号深度学习和数字线程的智能制造共性基础技术,开发具有原创技术的激光制造车辆关键零部件的智能过程、智能装备和智能产品,提升我国车辆智能制造基础,强化核心技术研发能力。
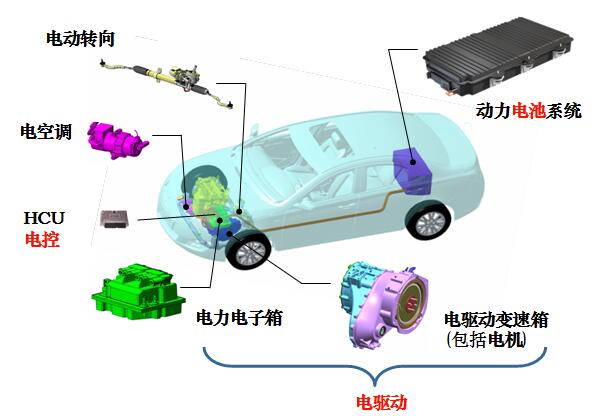
先进设计与软件方向围绕以车身为代表载体的复杂装备研究设计理论、开发设计工具、提供设计平台。方向以先进的CAE核心理论与计算方法为手段,研究具有原创性的设计理论、计算方法和软件平台,既注重理论研究的底层创新和国际前沿性、又聚焦解决国产软件工具从0到1的有无问题,保证实验室在车身结构创新设计领域的国内领先性和国际强竞争力。
数字化设计与制造安徽省重点实验室是合肥工业大学机械学科建设的安徽省重点实验室。实验室以数字化设计、数字化制造、数字化装备、数字化管理为导向,展开数字化设计与制造的研究。为了充分发挥省重点实验室的作用,利用重点实验室条件开展高层次、高水平的研究,支持新思想、新方法、新技术及交叉学科的发展,促进创新、求实、开放、交流的学术风气的形成,本实验室按计划设立自主创新专项课题。

哈尔滨工程大学机电工程学院机械设计及自动化系机械设计及理论团队。

东华大学机械工程学院智能机械与机构创新设计团队学科方向:高端与特种纺织装备及系统。研究内容:机构创新设计及应用研究、精密机电传动与系统及其在高端纺织装备上的应用、精密齿轮传动及其在机器人关节领域的应用研究、微型齿轮传动、水下/水面仿生机器鱼动力传动系统,CAD软件开发与应用、图像识别与三维重构、工程规划设计与仿真,智能材料超精密驱动系统及动力学设计,振动噪声控制。
标准解读《注浆式螺旋桩基础设计与施工规范》
中国电工技术学会 注浆式 螺旋桩基础设计 施工规范
2022/6/17
中国电工技术学会团体标准T/CES 089-2021《注浆式螺旋桩基础设计与施工规范》由国网江苏省电力有限公司连云港供电分公司牵头编制完成。该标准对注浆式螺旋桩基础设计与施工的基本原则和方法、架空电力线路杆塔的注浆式螺旋桩基础设计与施工进行了规范性要求,填补了国行标在该领域空白。该标准可解决连云港地区海相软土地基存在的问题,具有重大的社会、经济和生态效益。
长江大学机械工程学院研究方向机械设计及理论(图)
长江大学机械工程学院 研究方向 机械设计及理论
2022/12/31
长江大学机械工程学院研究方向机械设计及理论。研究领域:(1)现代设计理论与方法;(2)机械结构与强度;(3)服役装备力学环境表征与预示。
机械设计制造及其自动化专业是成都工业学院办学历史最为悠久的专业之一,拥有深厚的行业底蕴,致力于培养从事先进制造业领域高端制造的应用型科技创新人才,是四川省级一流本科专业建设点专业、四川省卓越工程师教育培养计划专业。近年来,本专业专业建设和课程教学改革取得丰硕成果,获得四川省教学成果一等奖1项、三等奖1项。建设有教育部首批国际在线课程、国家级精品课程、国家级精品资源共享课,四川省精品在线开放课程、四...

机械设计制造及其自动化专业是长安大学招收本科专业最早的工科专业之一,始建于1952年,1958年开始招收本科生。它综合了原筑路机械专业(1958年招收本科生)、机械制造及自动化专业(1963年招收本科生)、建筑机械专业(1979年招收本科生)、公路机械化施工与管理专业(1995年招收本科生)特色,形成了以工程机械设计制造为基础,以公路施工与施工管理、公路机械化养护与管理为应用特色的综合专业。现在设...
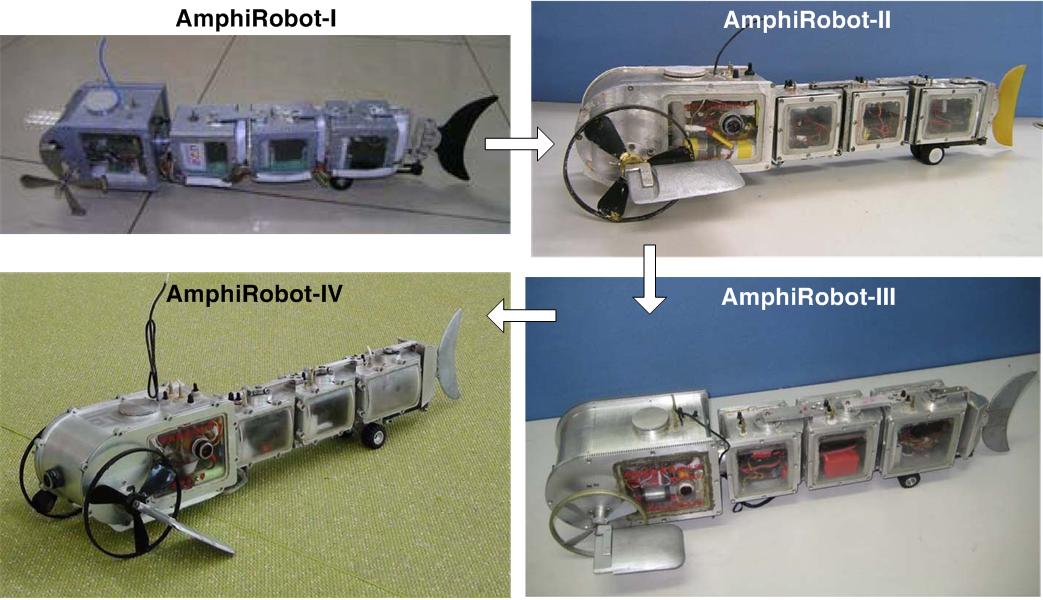
成果受到国家863项目“多模态仿生两栖机器人机构设计与运动控制 ”支持。通过机构创新和系统集成,以仿鱼推进技术为基础,辅以轮、桨、鳍一体化推进机构,研制具有快速游动性能、强大的环境感知功能及良好的水陆环境适应能力的两栖服务机器人。
针对复杂结构优化设计中常出现的低效率、低精度问题,提出支持向量回归机(SVR)响应面与进化多目标优化算法相耦合的优化系统。基于结构风险最小化推导SVR响应面建立原理,采用具有异点预测值可对比特色的正交旋转组合设计作为样本点选取法,以获得最优试验区。基于NSGA-Ⅱ范式原理建立区间偏好进化优化算法并构建优化系统框架。以45 t门机主梁为研究对象,指定5个几何参数为设计变量,对最大位移、应力进行约束,...
基于圆弧啮合线内啮合齿轮设计与特性分析
大重合度 内齿轮 啮合线 加载接触分析
2019/3/6
针对内啮合齿轮传动,提出1种基于圆弧啮合线的大重合度内啮合齿轮构造方法。选取连接外齿轮和内齿圈节圆交点和齿顶圆交点的圆弧为啮合线,构造在该啮合线上共轭的外齿轮和内齿圈齿顶齿廓;根据共轭原理设计与齿顶齿廓共轭的齿根齿廓,完成内齿圈齿根齿廓修形;对新齿形进行根切检验,分析新齿形啮合几何特性及加载接触;利用数控加工方法完成内啮合齿轮样件的加工并进行啮合试验。研究结果表明:新齿形不产生根切和齿顶干涉;与渐...