
搜索结果: 1-15 共查到“自动化技术应用 预测控制”相关记录18条 . 查询时间(0.271 秒)
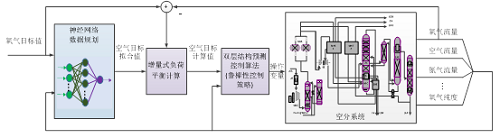
为解决空分系统大范围变工况下的强非线性和高度耦合等问题,中国科学院沈阳自动化研究所研究员邹涛团队设计了一种自动变负荷协同优化控制系统,实现了大型空分装置的安全、稳定、高效运行。相关成果发表在Control Engineering Practice上。空分装置是一种用于生产气态和液态氧气、氮气和氩气的复杂化工系统,其产品广泛应用于炼钢、化工、食品加工、半导体等诸多领域。但由于装置自身的高度非线性以及...
以有界干扰非线性系统为研究对象, 设计一种基于近似可达集的鲁棒预测控制方法. 该方法以鲁棒控制不变集作为终端约束集, 采用一种简单的三次多项式逼近预测控制的待优化控制律, 通过在线优化求解三次多项式的各项系数, 并从理论上证明了所设计的鲁棒预测控制律可以使系统输入状态稳定. 最后通过仿真实例验证了所提出的鲁棒预测控制方法的可行性和有效性.
星姿态直接自适应模糊预测控制
卫星姿态控制 非线性广义预测控制 自适应模糊控制
2010/2/23
对具有模型不确定性和未知外干扰的卫星姿态系统提出了多输入多输出直接自适应模糊预测跟踪控制设计方法. 此方法先基于卫星姿态动力学模型设计出非线性广义预测控制律,再构造直接自适应模糊控制器逼近预测控制律中因模型不确定性引起的未知项.文中证明了所设计的控制律能使卫星跟踪给定的期望姿态轨迹,跟踪误差收敛到原点的小邻域内. 仿真结果验证了此方法的有效性.
油料输送温度的智能预测控制
自适应粒子群优化算法 变参数PID 控制方法
2009/7/6
针对油料加热输送过程中具有大时滞非线性特点的流动加热控制问题,提出了一种智能预测控制方法。该方法采用自适应粒子群优化算法(APSO)辨识和优化预测模型及控制器的PID控制参数,克服油料流动加热控制模型的失配及系统的不确定性。通过对已知模型的仿真,以及与自整定PID控制的比较表明,该方法具有较好的控制效果。
催化裂化反应再生系统的预测控制研究
预测控制 二次动态矩阵控制 多变量系统
2008/12/30
针对大型炼油厂催化裂化装置反应再生系统的工艺和控制要求,设计了多变量二次动态
矩阵控制器,取得良好的仿真和工业应用试验效果.
基于双重准则的二自由度预测控制--连续情况
连续预测控制 广义谱分解 双重准则
2008/12/24
对二自由度连续预测控制系统进行了讨论.在保留连续预测控制基本特点的条件
下,取包含连续预测控制指标项、灵敏度及补灵敏度的综合指标函数,通过广义谱分解及构
造丢番图方程,求得使闭环系统内稳的解.最后举例说明该方法的有效性.
内模统一预测控制的进一步分析
预测控制 内模控制 统一预测控制
2008/12/22
统一预测控制克服了一般预测控制器设计时难以比较每种控制器效果的缺点,将每
个问题的设计统一在一种框架下进行,设计费用也显著降低.对单输入单输出系统,统一预测
控制是一种优越的预测控制方法.采用内模结构就设计参数和模型匹配性对统一预测控制闭
环系统的跟踪性能和鲁棒性能的影响作更为详细的分析.从中可以看出内模结构在预测控制
中的独特优点.本文最后对一些结论给出了仿真结果.
液压釜温度自适应预测控制
模型预测控制 自适应控制 液压釜控制
2008/12/15
详细介绍了液压釜温度系统自适应控制方案、误差分析及实际应用调试情况.应用
全系数自适应控制理论及模型预测控制原理设计了一种新的自适应预测控制方案,并给出了
控制算法的稳定性证明及闭环系统稳态误差和动态特性分析.实际应用表明,该方法对建模
误差、系统延时及测量噪声具有较好的鲁棒性.
一种多变量连续时间预测控制方法
多变量系统 预测控制 连续时间域
2008/12/11
将积分作用自然引入单变量连续时间域预测控制规律,并通过结合多变量频域设计方
法--特征轨迹法,将单变量预测控制推广到多变量情况.仿真结果表明,该多变量算法是有
效的.
指令跟踪自适应广义预测控制及其应用
自适应控制 预测控制 参考模型
2008/11/18
现有的广义预测控制系统其闭环性能受可调参数影响较大,它的目标函数无法直接规定
闭环性能.该文提出一种具有独立跟踪和调节目标的新型自适应广义预测控制算法,并将其
应用于快速时变的导弹控制系统设计中.这种算法利用参考模型规定对指令信号的跟踪性
能,减少了可调参数对闭环性能的影响.仿真结果证实了该算法的有效性.
基于神经模型预测控制的主动队列管理算法
神经模型预测控制器
主动队列管理
鲁棒性
Pade 近似
2007/8/27
Abstract基于模型预测理论,出了用于支持TCP流的IP路由器主动队列管理控制器--神经模型预测控制器(NMPC).这种控制器使用了不同的时间延迟环节近似方法以及不同的近似非线性模型.控制器的主要目标是在高动态网络条件下稳定瓶颈路由器的队列长度.仿真结果表明,与采用RED算法及REM算法的控制器相比, 这种控制器具有较好的鲁棒性和较短的响应时间, 尤其是网络在大流量和具有高动态性条件下效果更为...
Abstract因混杂系统预测控制(PC-HS)具有在线处理控制量和状态量的约束等优点,而成为学术界研究的一个热点.系统地论述了PC-HS的发展和研究现状,在介绍混杂系统的背景和模型的基础上,重点讨论了PC-HS的各种算法%性能等几个前沿问题,并对PC-HS目前研究中存在的问题进行了分析,对未来的一些研究方向进行了展望.
基于动态非线性逼近的非线性系统预测控制
非线性系统
广义预测控制
参数自适应递推预报
2007/8/27
Abstract对于一类常见多重时滞非线性离散系统,提出基于动态非线性逼近的增量型最小化递推预测模型、广义预测控制律、噪声估计器以及参数自适应递推预报算法,实现了对存在较大滞后的时滞非线性系统的广义预测控制.仿真结果表明了该算法的正确性和有效性.