
搜索结果: 1-1 共查到“机械工程 清华大学机械系摩擦实验室”相关记录1条 . 查询时间(0.73 秒)
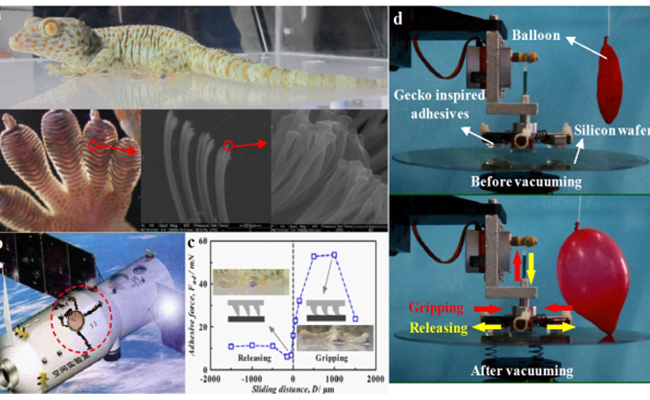
古希腊哲学家亚里士多德在《动物的历史》一书中对壁虎卓越的攀爬能力进行了描述。近年研究发现壁虎的攀爬能力主要源于脚掌多等级刚毛结构与壁面间的范德华力作用,通过脚趾卷入和卷出可以控制强黏附和易脱附。由于范德华力在自然界中普遍存在,仿壁虎干黏附表面不但可用于大气环境下的爬壁机器人、夹持器等,还可以拓展到空间环境的应用,如宇航员手套、空间垃圾回收、空间驻留平台维护机器人等。目前,仿生黏附表面主要用刻蚀-浇...