
搜索结果: 1-15 共查到“滤波器”相关记录494条 . 查询时间(0.18 秒)
集微网消息,2023年10月27日,位于江苏省南通市如东县泛半导体产业园的如东声芯电子科技有限公司首批设备进场。
中国科学院上海应用物理研究所专利:一种抑制信号振铃的滤波器
中国科学院上海应用物理研究所 专利 抑制信号振铃 滤波器
2023/7/25
中国科学院上海应用物理研究所专利:一种抑制信号振铃的滤波器
中国科学院微电子研究所专利:一种跨导放大器、电阻、电感以及滤波器
中国科学院微电子研究所 专利 跨导放大器 电阻 电感 滤波器
2023/7/10
中国科学院微电子研究所专利:一种跨导放大器、电阻、电感以及滤波器
中国科学院声学研究所专利:一种基于连续时间有源滤波器芯片的抗混叠带通滤波器
中国科学院声学研究所专利:一种串声消除滤波器的生成方法及三维声音重放方法
中国科学院声学研究所专利:一种基于自适应滤波器的管道泄漏定位装置
核自适应滤波器(Kernel adaptive filter,KAF)是时间序列在线预测的重点研究领域之一,本文对核自适应滤波器的最新进展及未来研究方向进行了分析和总结.基于核自适应滤波器的时间序列在线预测方法,能较好地解决预测、跟踪问题。
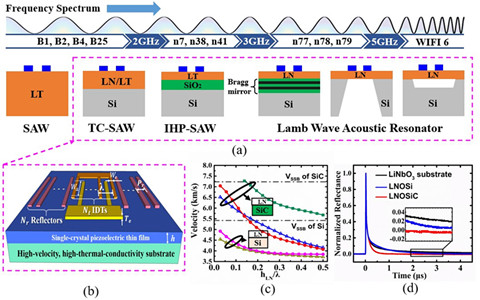
上海微系统所异质集成XOI课题组利用“万能离子刀”剥离和转移技术,将单晶压电薄膜与高声速、高导热的支撑衬底集成,研制出可同时激发声表面波和兰姆波的压电异质衬底,并基于上述衬底验证了适用于3G、4G、5G应用的高性能射频声学器件。相关技术方案于12月15日以“Surface Wave and Lamb Wave Acoustic Devices on Heterogenous Substrate f...
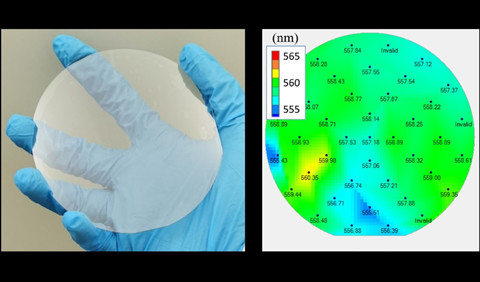
上海微系统所异质集成XOI课题组利用“万能离子刀”剥离与转移技术,将LiNbO3单晶薄膜与高声速、高导热的支撑衬底异质集成(如图1所示),与美国伊利诺伊大学厄巴纳-香槟分校合作,研制出高性能声表面波(SAW)器件。声表面波谐振器的谐振频率约1.95 GHz,导纳比高达80.1 dB,机电耦合系数高达27.8%,Q值接近2000,谐振器的综合性能品质优值(FoM)高达530,为已报道的最高值 (如图...
兰州交通大学模拟电子技术实验课件实验8 模拟低通滤波器频率特性测试。
基于卡尔曼滤波器的半捷联导引头控制系统设计
半捷联导引头 伺服控制 目标跟踪 卡尔曼滤波
2020/4/3
分析了滚仰式半捷联导引头控制系统原理,给出了导引头的状态方程与量测方程,提出了一种基于目标运动状态估计的卡尔曼滤波方法并将其应用于导引头控制;建立了滚仰式半捷联导引头控制仿真模型。仿真结果表明:提出的基于目标运动状态估计的卡尔曼滤波方法对导引头控制干扰和测量噪声具有良好的滤波作用,有效提高了导引头控制系统的鲁棒性,能够使导引头在控制干扰和噪声作用下保持对运动目标的稳定跟踪,为滚仰式半捷联导引头控制...
西安电子科技大学数字信号处理课件实验5 用窗函数法设计FIR滤波器。
西安电子科技大学数字信号处理课件实验4 设计IIR滤波器。