
搜索结果: 1-15 共查到“控制科学与技术 多模态”相关记录15条 . 查询时间(0.212 秒)


2021年12月,中国科学院沈阳自动化研究所工业控制网络与系统研究室在机械臂多模态随动感知领域取得了新进展,提出了一种多模态感知单元的空间联合标定方法,相关研究成果以论文形式(Monocular Visual-Inertial and Robotic-Arm Calibration in a Unifying Framework)发表在国际自动化领域的权威期刊IEEE/CAA Journal of...

全媒体多模态大模型研发计划发布 助力媒体融合发展(图)
“全媒体多模态大模型” “紫东太初” 媒体融合 智能化
2022/3/4
2021年12月5日,第九届中国新兴媒体产业融合发展大会在海南博鳌举行。中国科学院自动化研究所、新华社技术局、媒体融合生产技术与系统国家重点实验室联合发布“全媒体多模态大模型研发计划”,将在媒体科技领域进行全新合作,通过技术创新推动媒体融合发展。

中国科学院关键技术研发团队项目“多模态分子影像关键技术”顺利通过结题验收(图)
中国科学院 多模态分子影像 关键技术 结题验收
2019/10/16
2019年9月27日,由我所分子影像院重点实验室承担的中国科学院关键技术研发团队项目“多模态分子影像关键技术”顺利通过专家组结题验收。项目验收会由徐涛院士主持,生命医学领域的11位科学仪器专家和条财局领导出席了会议。结题验收会上,项目负责人田捷研究员对项目团队近三年所取得的成果进行了全面的总结汇报,对团队在关键技术、临床应用和产业转化方面所取得的全链条创新成果做了详细介绍。团队核心骨干成员代表惠辉...
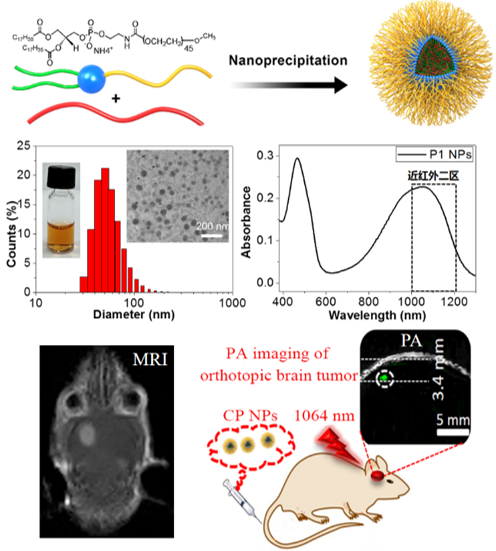
脑胶质瘤是一种严重危害人类健康的中枢神经系统重大脑疾病。脑胶质瘤细胞的生长特点为浸润性生长,沿着神经纤维向周围脑区弥漫播散,与正常脑组织无明显界限,手术难以完全切除,术后极易复发。因此,精准识别脑胶质瘤边界是当前医学界迫切需要解决的关键科学问题。在科技部973项目“脑胶质瘤精准诊疗技术的关键科学问题研究”的资助下,郑海荣、盛宗海和刘斌等在前期工作的基础上(ACS Nano, 2017, DOI: ...
基于GMM的多模态过程模态识别与过程监测
多模态过程 过程监测 模态识别 连续退火机组
2015/5/19
多模态复杂过程的多变量、多工序、变量时变性以及模态转换时间不确定等多种原因, 导致面向多模态生产过程的监测问题十分复杂. 对此, 基于高斯混合模型的监测方法, 结合定性知识和定量知识, 解决了多模态过程监测中离线数据模态划分、稳定模态和过渡模态的监测模型建立以及在线数据的模态识别等关键问题, 最终实现了对多模态过程的监测.

2012年2月26日,由中国科学院自动化研究所田捷研究员任首席科学家的国家重点基础研究发展计划(973计划)滚动支持项目“多模态分子影像关键科学问题研究”召开2011年度总结会,对项目过去一年的研究进展进行了全面总结。
矿浆管道输送流速仿人智能多模态控制研究
矿浆管道输送 多泵站输送平台 输送流速 仿人智能控制
2012/2/27
针对矿浆管道输送流速控制的大时滞、建模困难等问题,提出分段变增量的仿人智能多模态控制新算法.将完整矿浆批量输送实际过程划分成多段特征模态,采用不同的控制增量算法以推理确定控制模态. 基于新研制的多泵站管道输送平台,给出了系统结构框图与算法模块设计,采用两种矿浆管道批量输送流速运行方式,实现了满意的实时控制,验证了控制系统结构与算法的可行性和有效性.
多模态的故障监测是一个复杂的问题,既需要考虑稳定模态下的故障监测, 也需要考虑不同模态间的过渡故障监测。不同稳定模态下的数据具有不同的相关关系, 对每个稳定模态需要建立不同的稳定模态模型。当稳定生产模态发生改变时,生产过程进入过渡模态, 需要考虑过渡变量相关关系的变化。本文通过对过渡数据差分,得到变量相对变化信息。用PCA分段对差分变量的相关特性进行分析, 提取相对变化的特征。最后以实际连续退火机...
多模态分子影像系统获WIPO最佳发明奖
多模态分子影像系统 WIPO 最佳发明奖
2009/9/2
在刚刚结束第十八届全国发明展览会上,由中国科学院自动化研究所和广州中科恺盛医疗科技有限公司联合研制的“多模态分子影像系统”获得了世界知识产权组织(WIPO)颁发的“WIPO最佳发明奖”,该奖项为展览会最高奖项(1700多项参展项目中仅有一个),同时还获得了展览会“发明金奖”。本届展览会于2009年8月12日至15日在云南省昆明国际会展中心举行,是由中国发明协会和云南省人民政府主办,科技部、全国总工...
多模态控制在机器人路径规划中的应用
路径规划 PID 多模态
2009/7/23
路径规划作为机器人基本动作实现的基础,其优劣将直接影响动作的实时性和准确性。经典PID控制虽然能准确跟踪目标,但缺乏轨迹优化能力,提出应用多模态控制方法,通过不同的感知驱动相应运动控制,以静态目标导航和动态目标导航为例详细介绍了多模态控制设计方法,并以上海交大的中型机器人Frontier-I为例,通过实验与PID进行比较,验证了方法的有效性。
遗传算法求解多模态优化问题的动力性
双峰函数 Walsh变换 基因池遗传算法
2008/12/5
多模态函数一般存在多个局部极值解, 局部极值解处适应值的大小很大程度上影响了它们被遗传算法搜索到的概率. 为了弄清楚这种影响机制, 通过分析基因池遗传算法的无限种群动力系统, 刻画了双峰函数局部极值解的适值差与系统不动点之间的解析关系, 进一步分析推广了理论结果的适用范围. 最后, 提出针对多模态优化问题的两阶段遗传算法, 给出了应用理论结果改善遗传搜索性能的范例, 实验结果表明该算法对多模态函数...
智能服务型机器人的多模态感知接口与导航技术研究
多模态感知接口 智能服务型机器人
2008/10/31
课题的研究成果表现为多模态交互式智能轮椅及一系列相关技术专利和软件产品。本成果使轮椅机器人具有“多模态人机交互”和“非结构场景下的融合导航”两大主要功能,即轮椅具有能看、会想、能听、会说等拟人化能力。具体成果包括硬件控制模块、头部姿势分析模块、手部跟踪与姿势识别模块、语音识别与合成模块、基于视觉的自定位模块和多传感器融合模块等。其关键技术的研究综合了移动机器人控制与导航,计算机视觉,人工智能,模式...
智能服务型机器人的多模态感知接口与导航技术研究
机器人 导航技术 多模态感知接口
2008/8/28
该成果使轮椅机器人具有“多模态人机交互”和“非结构场景下的融合导航”两大主要功能,即轮椅具有能看、会想、能听、会说等拟人化能力。具体成果包括硬件控制模块、头部姿势分析模块、手部跟踪与姿势识别模块、语音识别与合成模块、基于视觉的自定位模块和多传感器融合模块等。其关键技术的研究综合了移动机器人控制与导航,计算机视觉,人工智能,模式识别,多传感器融合等多学科知识,具有创新性强、实用性强和可扩展性强等特...