
搜索结果: 31-45 共查到“知识要闻 工业机器人技术”相关记录315条 . 查询时间(4.332 秒)

2023年7月5日上午在腾飞楼C座412室,西北工业大学教授、博士生导师秦现生教授科研团队为学院师生做了题为《智能机器人应用技术创新及实践》专题讲座,学院院长张胤教授、副院长张超教授与广大师生参加了讲座。

沈阳自动化所在复杂曲面机器人自动化磨抛加工领域取得新进展(图)
机器人自动化 磨抛加工 航空发动机
2023/8/22
2023年6月1日,中国科学院沈阳自动化研究所在复杂曲面机器人自动化磨抛加工领域取得新进展,提出了一种基于六点定位原理的叶片坐标系自动标定方法,实现了航空发动机叶片磨抛加工过程中动态工件坐标系的自动标定。该研究成果于2023年6月1日在线发表在计算机/制造领域期刊Robotics and Computer-Integrated Manufacturing。

全国科技活动周丨第五届中国机器人技能大赛暨机器人创新与实践论坛在宁举行(图)
科技活动周 机器人 技能大赛
2023/11/12
2023年5月19日至21日,在第七个全国科技工作者日来临之际,第五届中国机器人技能大赛暨机器人创新与实践论坛在南京工业大学落下帷幕。天津大学、中国人民解放军陆军工程大学、南京工业大学等10所院校14支参赛队伍喜获冠军。
为进一步增强科研意识、拓宽学术视野、提升科研能力,2023年5月22日上午海南大学机电工程学院特邀新加坡南洋理工大学谢明教授开展主题为《人形机器人的关键知识与技术》的专题学术讲座,活动由张喜瑞副书记主持,相关研究生导师、在读博士和硕士研究生参与本次讲座。
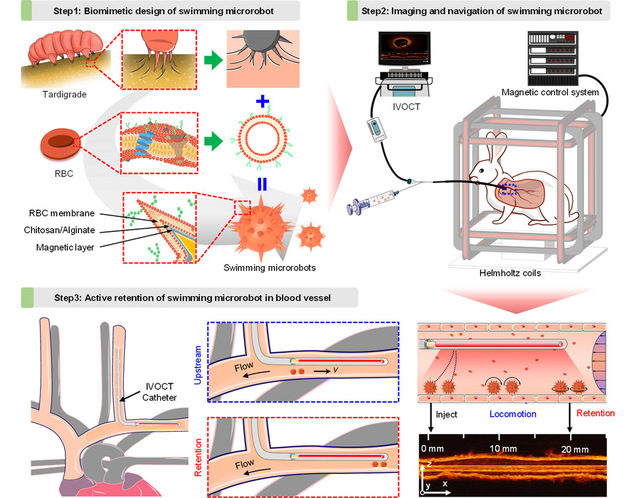
近日,机器人技术与系统全国重点实验室、哈尔滨医科大学第一附属医院等联合开发出仿水熊虫医用微纳机器人,可实现在静脉血高速流环境中可控运动及靶向驻停,相关成果以《可在血管中靶向驻停的仿水熊虫医用微纳机器人》(Bioinspired claw-engaged and biolubricated swimming microrobotscreating active retention in blood ...

近日,机器人技术与系统全国重点实验室高海波教授团队在野外足式机器人环境认知学习与自主导航方面取得重要进展,相关研究成果以《足式机器人的环境物理特征类动物学习》(Learning physical characteristics like animals for legged robots)为题,并以封面论文形式发表在《国家科学评论》(National Science Review,NSR)上。相关...

本田科研院(欧洲)王超博士受邀为东华大学机械工程学院作题为“面对人机协同的交互设计:以车联网、自动驾驶和机器人为例”的学术讲座(图)
本田科研院 王超 东华大学 机械工程学院 车联网 自动驾驶 机器人 学术讲座
2023/5/8
本田科研院(欧洲)高级科学家王超博士受邀东华大学机械工程学院作题为“面对人机协同的交互设计:以车联网、自动驾驶和机器人为例”的学术讲座。此次讲座主要面向机械工程、工业设计等专业的师生,由工业设计系杨钟亮老师主持。

近日,南方科技大学机械与能源工程系副教授王宏强团队和戴建生院士团队合作在机器人领域国际期刊Advanced Intelligent Systems上发表了一篇基于各向异性刚度仿生软体机器人的研究论文,论文标题为 “Soft Robots for Cluttered Environments Based on Origami Anisotropic Stiffness Structure (OASS...

2023年度中国电子学会学术交流活动计划(图)
电子学会 学术交流 活动计划
2023/3/6
为积极响应国家电子信息发展战略和行业发展需求,促进电子信息学科发展及学术交流,更好的服务广大学会会员和科技工作者,中国电子学会2023年计划继续开展众多高质量学术交流活动,学术交流领域将涵盖物联网、大数据、人工智能、量子信息、集成电路、元宇宙、区块链、5G/6G、虚拟现实、数字经济、工业互联网、机器人等热点及前沿领域,也将覆盖微波、天线、雷达、通信、信号处理、信息论、太赫兹、导航、机械电子、超导电...
《新一代信息技术》网站正式上线
信息技术 网站 电子学会
2023/3/9
《新一代信息技术》创刊于2018年,是中国电子学会主办的专业性学术期刊。《新一代信息技术》读者对象面向相关学科的科研人员、技术人员、高等学校师生、各级科研及相关高新技术企业管理人员与技术人员。期刊办刊宗旨为:刊载信息技术相关学科方面的新思维、新发现、新技术、新成果以及新进展,为国内外专业人员搭建智能信息科学技术的学术交流平台,为我国的智能信息技术发展贡献力量,促进我国高新技术产业的发展向一流迈进 ...
中国科学院宁波材料技术与工程研究所在磨抛机器人方面取得进展
磨抛 机器人 力控 末端执行器
2023/3/27
磨抛是典型的连续接触式操作,力控技术直接影响磨抛效率和质量,因而至关重要。传统上,一般采用基于机器人关节力矩的直接力控方法,存在力控精度低、动态响应慢等缺点。而机器人加力控末端执行器的间接力控方法采用了宏微系统结构,在小范围内动作时只需调整力控末端执行器的位姿即可,避免了宏机器人大惯性动作对力控精度和动态响应的影响,可有效解决直接力控方法存在的问题。目前,虽然有研发机构或公司研制了力控末端执行器,...

近日,第十四届中国国际航空航天博览会在珠海开幕,中国科学院沈阳自动化研究所机器人学国家重点实验室多项科技成果亮相此次航展。在此次航展上,机器人学国家重点实验室展出了自主研发的“云雀”高原型无人机实物、可回收式固定翼无人机蜂巢系统模型,以及多项成果通过展板形式展出。现场通过影像资料展示了“云雀”无人机实现我国首次机器人化高海拔科考和固定翼无人机蜂巢系统船载释放回收等相关工程应用成果。

超疏水微型机器人可以在外界刺激下在水面上高效游动,围绕这一现象科学家们展开了诸多研究,探索它的这一特性在诸多领域的应用前景,例如细胞操作,净化水源等。然而,目前大部分对于超疏水微型机器人的研究都是围绕单一刺激的驱动模式,使得超疏水微型机器人的运动和功能在复杂的水环境中受到了限制。

根据来自中国大洋第75航次消息,由中国科学院沈阳自动化研究所机器人学国家重点实验室联合北京先驱高技术开发有限责任公司等单位研制的矿址近底自主光学精细调查测量系统“洞察”号自主水下机器人,近日在西太平洋先驱多金属结核矿区完成了海试。
