
ЫбЫїНсЙћ: 1-12 ЙВВщЕНЁАЛњаЕжЦдьздЖЏЛЏ ЮЂаЭЁБЯрЙиМЧТМ12Ьѕ . ВщбЏЪБМф(0.039 Уы)

жаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљЛњЦїШЫбЇЙњМвжиЕуЪЕбщЪвЮЂаЭЛњЦїШЫбаОПШЁЕУаТНјеЙЃЈЭМЃЉ
жаЙњПЦбЇдК Щђбє ЛњЦїШЫбЇ ЮЂаЭЛњЦїШЫ ФЩУз
2023/3/13
ГЌЪшЫЎЮЂаЭЛњЦїШЫПЩвддкЭтНчДЬМЄЯТдкЫЎУцЩЯИпаЇгЮЖЏЃЌЮЇШЦетвЛЯжЯѓПЦбЇМвУЧеЙПЊСЫжюЖрбаОПЃЌЬНЫїЫќЕФетвЛЬиаддкжюЖрСьгђЕФгІгУЧАОАЃЌР§ШчЯИАћВйзїЃЌОЛЛЏЫЎдДЕШЁЃШЛЖјЃЌФПЧАДѓВПЗжЖдгкГЌЪшЫЎЮЂаЭЛњЦїШЫЕФбаОПЖМЪЧЮЇШЦЕЅвЛДЬМЄЕФЧ§ЖЏФЃЪНЃЌЪЙЕУГЌЪшЫЎЮЂаЭЛњЦїШЫЕФдЫЖЏКЭЙІФмдкИДдгЕФЫЎЛЗОГжаЪмЕНСЫЯожЦЁЃ
ФЯЗНПЦММДѓбЇЛњаЕгыФмдДЙЄГЬЯЕЭѕКъЧПЭХЖгдкЮЂаЭЛњЦїШЫСьгђШЁЕУЯЕСаНјеЙ
ЭѕКъЧП ЮЂаЭЛњЦїШЫ ЕчЛњ Micromachines
2023/11/30
НќШеЃЌФЯЗНПЦММДѓбЇЛњаЕгыФмдДЙЄГЬЯЕЭѕКъЧПИБНЬЪкЭХЖгдкЛњЕчСьгђЖЅМЖЦкПЏжЎвЛIEEE Transactions on Mechatronics (TMech) ЩЯЗЂБэСЫвЛЦЊЙигкЕЅЕчЛњЧЗЧ§ЖЏЕФЮЂаЭЛњЦїШЫЕФбаОПТлЮФЁЃТлЮФБъЬтЮЊ ЁАSimoBot: An Underactuated Miniature Robot Driven by a Single MotorЁБЁЃ

жаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљЬсГіЛљгкЦјХнЮЂаЭЛњЦїШЫЕФЮЂНсЙЙвЛЬхЛЏзАХфМАЧ§ЖЏЗНЗЈЃЈЭМЃЉ
ЦјХн ЮЂаЭЛњЦїШЫ ЮЂНсЙЙ вЛЬхЛЏзАХф Ч§ЖЏЗНЗЈ
2021/2/23
НќШеЃЌжаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљЮЂФЩУзПЮЬтзщдкЮЂаЭЛњЦїШЫбаОПСьгђгжШЁЕУаТЭЛЦЦЃЌЫљбаОПЕФЦјХнЮЂаЭЛњЦїШЫЪЕЯжСЫЖдЖрИіЮЂНсЙЙЕФвЛЬхЛЏзАХфМАЧ§ЖЏЃЌбаОПНсЙћЗЂБэдкACS Applied Materials & InterfacesЁЃЛњЦїШЫБЛЙуЗКгУгкЦћГЕжЦдьЁЂЗЩЛњХчЦсЕШЙЄвЕздЖЏЛЏСьгђЃЌЕЋгУгкЩњЮявНбЇЕФЮЂНсЙЙВПМўзАХфЩаЮДЪЕЯжздЖЏЛЏЁЃЫцзХжЦдьвЕЕФЮЂаЭЛЏЃЌФПЧАМгЙЄЕФЮЂНсЙЙжЛгаМИЪЎЮЂУзЛђМИАйЮЂУзГЄЃЌШчКЮЖдетУДаЁЕФНсЙЙ...

жаЙњПЦбЇдКЩюлкЯШНјММЪѕбаОПдКбаЗЂГіЪмеТгуЦєЗЂЕФЖрЙІФмЮЂаЭШэЬхЛњЦїШЫЃЈЭМЃЉ
жаЙњПЦбЇдКЩюлкЯШНјММЪѕбаОПдК еТгу ЖрЙІФм ЮЂаЭ ШэЬхЛњЦїШЫ
2020/1/10
НќШеЃЌжаЙњПЦбЇдКЩюлкЯШНјММЪѕбаОПдКвНЙЄЫљФЩУзЕїПибаОПжааФЖХбЇУєбаОПЭХЖггыжЧФмЗТЩњжааФЮтаТгюКЭаьЬьЬэбаОПЭХЖгКЯзїЃЌбаЗЂГіЪмеТгуЦєЗЂЕФЖрЙІФмЮЂаЭШэЬхЛњЦїШЫЃЌМЏГЩЖрФЃЬЌдЫЖЏЁЂПЩПиБфаЮЁЂЙтбЇЮБзАЁЂПЩЪгЛЏИажЊЛЗОГЕШЙІФмгквЛЬхЃЌМЋДѓЬсЩ§СЫШэЬхЛњЦїШЫдкИДдгЯогђПеМфФкдЫЖЏгыжДааЖржиШЮЮёЕФФмСІЁЃбаОПГЩЙћвд"Reconfiguration, Camouflage and Color-shifting for Bioi...
жаЙњПЦбаШЫдБШеЧАПЊЗЂГівЛжжДХадЮЂгЮЖЏЛњЦїШЫЃЌПЩЯёЁАвЯШКЁБвЛбљГЩЧЇЩЯЭђЕизщЖгаЭЌзївЕЃЌгаЭћЮЊИпаЇАаЯђИјвЉКЭЬхФкГЩЯёЬсЙЉНтОіЗНАИЁЃЗЂБэдкаТвЛЦкУРЙњЁЖПЦбЇЁЄЛњЦїШЫбЇЁЗдгжОЩЯЕФетвЛбаОПЯдЪОЃЌетжжГЪЛЈЩњзДЕФДХадЛњЦїШЫГЄ3ЮЂУзЃЌжБОЖ2ЮЂУзЃЌжЛгаЭЗЗЂЫПжБОЖЕФдМЫФЪЎЗжжЎвЛЁЃгЩДѓСПетжжЛњЦїШЫзщГЩЕФШКЬхПЩдка§зЊДХГЁЕФЕїПиЯТБфЮЊГЄСДЃЌдкЯСГЄЕФФЃФтУЋЯИбЊЙмжаДЉааЁЃ
жаЙњПЦбЇдКЩюлкЯШНјММЪѕбаОПдКЮЂаЭЬижжЛњЦїШЫбаОПШЁЕУаТНјеЙЃЈЭМЃЉ
жаЙњПЦбЇдКЩюлкЯШНјММЪѕбаОПдК ЛњЦїШЫ
2017/10/13
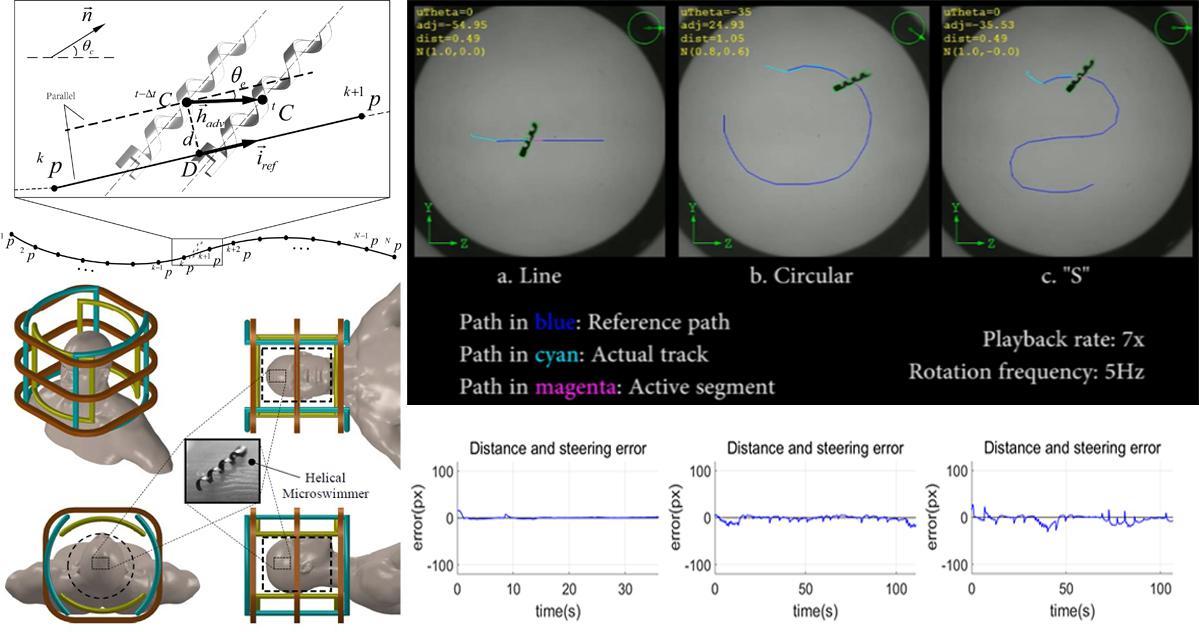
НќШеЃЌдкЙњМвздШЛПЦбЇЛљН№ЁЂЩюлкЪаПЦДДЮЏбЇПЦВМОжЕФзЪжњЯТЃЌжаЙњПЦбЇдКЩюлкЯШНјММЪѕбаОПдКМЏГЩЫљжЧФмЗТЩњжааФаьЬьЬэИБбаОПдБЙЄзїзщОЙ§ГЄЪБМфХЌСІЃЌГЩЙІбаОПГіСЫеыЖдЕЭРзХЕЪ§вКЬхжаДХПиЮЂаЭЛњЦїШЫЕФТЗОЖИњЫцЗНЗЈЃЌвдМАвЛЬзШЋаТЕФЖрздгЩЖШДХПизАжУЁЃИУГЩЙћОпгаИќИпЕФПижЦзМШЗадЃЌВЂЧвжЇГжШЫЛњНсКЯНЛЛЅЪНПижЦЃЌЪЙЮЂаЭЛњЦїШЫММЪѕИќМгЬљНќЪЕМЪгІгУЁЃЯрЙиНсЙћImage-Based Visual Servoing of Helic...

ББОЉРэЙЄДѓбЇОйАьЮЂаЭЩњЮявНбЇгУЛњЕчвЛЬхЛЏКЭздЖЏЛЏЯЕЭГЙњМЪбаЬжЛсЃЈЭМЃЉ
ЛЎЪБДњЕФЛњЦїШЫгыПижЦММЪѕ КЯзїЛњЦїШЫPaDYМАЦфЯжЪЕжаЕФдЫгУ
2016/5/10
2016Фъ5дТ6Ше-7ШеЃЌЩњУќбЇдКдкЙњМЪНЬг§НЛСїжааФОйАьЮЂаЭЩњЮявНбЇгУЛњЕчвЛЬхЛЏКЭздЖЏЛЏЯЕЭГЙњМЪЛсвщЃЈInternational Workshop on Intelligent Mechatronics and Automation for Biomedical ApplicationЃЉЁЃРДздУРЙњЁЂМгФУДѓЁЂШеБОЁЂжаЙњЯуИлКЭаЃФкЕФзЈМвЁЂЪІЩњ60грШЫВЮМгСЫбаЬжЁЃЩњУќбЇдКЕГЮЏЪщМЧСѕДцИЃЃЌЩњУќбЇдКИБдКГЄРю...
ЮЂаЭЖўЮЌЩЈУшОЕЪЧвЛжжЛљгкЮЂЙтЛњЕчЯЕЭГЃЈMOEMSЃЉММЪѕЕФаТаЭЦЋзЊЩЈУшзАжУЃЌгыДЋЭГЩЈУшзАжУЯрБШОпгаЬхЛ§аЁЁЂЙІКФЕЭЁЂЩЈУшЦЕТЪИпЕШгХЕуЁЃИјГіСЫвЛжжMOEMSЮЂаЭЖўЮЌЩЈУшОЕЕФЩшМЦЗНАИЃЌНЈСЂСЫЖўНзеёЖЏЯЕЭГЕФЖЏСІбЇФЃаЭЃЌЭЦЕМСЫЯЕЭГИеЖШКЭЩЈУшЦЕТЪЕФМЦЫуЪНЃЌвдМАMOEMSЮЂаЭЖўЮЌЩЈУшОЕдкСНИіЗНЯђЩЯЕФзюДѓЦЋзЊНЧЁЃВЩгУгаЯодЊЗНЗЈЖдЯЕЭГНјааСЫФЃЬЌЗТецЁЂаГЯьгІЗжЮіКЭгІСІЗТецЃЌЗжЮіНсЙћОљЗћКЯЩшМЦвЊЧѓЃЌбщжЄСЫИУЗНАИЕФПЩааадКЭ...
ТлЪіСЫЮЂаЭЙмЕРЛњЦїШЫвЦЖЏЛњЙЙЕФЗЂеЙБГОА,дкНщЩмСЫвбгаЕФЮЂаЭЙмЕРЛњЦїШЫвЦЖЏЛњЙЙЕФЛљДЁЩЯ,жИГіСЫетжжвЦЖЏЛњЙЙЕФШБЯн.ШЛКѓЩшМЦСЫвЛжжаТаЭЮЂаЭЙмЕРЛњЦїШЫЕФвЦЖЏЛњЙЙ,ВЂИјГіСЫЦфдЫЖЏЛњРэМАЕчДХЬњЕФжївЊВЮЪ§МЦЫуЙЋЪН.етжжаТаЭЮЂаЭЙмЕРЛњЦїШЫЕФвЦЖЏЛњЙЙвдЕчДХЧ§ЖЏ,ПЩЪЕЯждкЮЂаЭЙмФкЕФЫЋЯђШфЖЏдЫаа,ВЂФмЙЛНЯЫГГЉЕФЫцЭфЙмаЮзДБЛЖЏзЊЯђ.
ЭтДХГЁЧ§ЖЏЮоРТЮЂаЭЛњЦїШЫаазпЬиадЕФЗжЮі
2007/7/28
НБРјаХЯЂ
НБРјУћГЦ
ЭтДХГЁЧ§ЖЏЮоРТЮЂаЭЛњЦїШЫаазпЬиадЕФЗжЮі
ЭъГЩШЫ
еХгРЫГ
ЭъГЩЕЅЮЛ
ДѓСЌРэЙЄДѓбЇЛњаЕбЇдК
ЭЦМіЕЅЮЛ
ЛњаЕбЇдК
ЪкНБЛњЙЙ
жаЙњПЦа
ЪкНБШеЦк
2003Фъ
7дТ
28Ше
НБРјжжРр
СЩФўЪЁздШЛПЦбЇбЇЪѕГЩЙћТлЮФНБ
НБРјЕШМЖ
ЖўЕШ
НБРјБрКХ
1045
ЯрЙиЯюФП
ЬхФкЗТЩњгЮЖЏЮЂЛњЦїШЫЕФЛњРэКЭЭтДХГЁЧ§ЖЏПижЦЗНЗЈ
ОнгЂЙњУНЬх2007Фъ4дТ18ШеБЈЕРЃЌУРЙњЕФПЦбЇМвЫЕЃЌЫћУЧЗЂУїСЫвЛжжЮЂаЭЁАЛњЦїУЋУЋГцЁБЃЌПЩвддкаФдрБэУцХРааПЊеЙЪжЪѕЁЃ
ОнАФДѓРћбЧЙуВЅЙЋЫО2007Фъ2дТ6ШеБЈЕРЃЌУРЙњПЦЛУзїМвАЌШјПЫ•АЂЮїФЊЗђБЪЯТЩёЦцЕФЮЂаЭДЌЖгШЫЬхжЎТУНЋвЊЪЕЯжСЫЁЃбаОПШЫдБЗЂЯжСЫвЛжжгУЯИОњЕФздЩэЭЦНјСІЧ§ЖЏЮЂаЭЛњЦїШЫДЉаавКЬхЕФЗНЗЈЁЃ
жаЙњбаОПЩњНЬг§ХХааАё-Ьѕ
- е§дкМгди...
жаЙњбЇЪѕЦкПЏХХааАё-Ьѕ
- е§дкМгди...
ЪРНчДѓбЇПЦбаЛњЙЙХХааАё-Ьѕ
- е§дкМгди...
жаЙњДѓбЇХХааАё-Ьѕ
- е§дкМгди...
ШЫЁЁЮя-ЦЊ
- е§дкМгди...
ПЮЁЁМў-ЦЊ
- е§дкМгди...
ЪгЬ§зЪСЯ-ЦЊ
- е§дкМгди...
баеазЪСЯ -ЦЊ
- е§дкМгди...
жЊЪЖвЊЮХ-ЦЊ
- е§дкМгди...
ЙњМЪЖЏЬЌ-ЦЊ
- е§дкМгди...
ЛсвщжааФ-ЦЊ
- е§дкМгди...
бЇЪѕжИФЯ-ЦЊ
- е§дкМгди...
бЇЪѕеОЕу-ЦЊ
- е§дкМгди...