搜索结果: 1-15 共查到“机械制造自动化 成果”相关记录68条 . 查询时间(0.429 秒)

中国发明协会2023年度“发明创业奖创新奖”获奖名单揭晓,苏州大学机电工程学院王明娣、赵栋、孙立宁、朱刚贤老师的成果“激光表面清洗机器人”荣获“中国发明协会发明创业奖创新奖”二等奖。

近日,工学院权龙哲教授智能农田管理装备团队连续在国际权威期刊《Soil & Tillage Research》(IF=7.4,中科院一区,TOP),《Computers and Electronics in Agriculture》(IF=8.3,中科院一区,TOP),《Biosystems Engineering》(IF=5.1,中科院一区,TOP)、《Frontiers in Plant Sc...

2023年5月18日,科技部“战略性科技创新合作”重点专项“一带一路”合作项目科技成果“应急救援机器人”交接仪式以线上和线下相结合的方式举行。黎巴嫩民防总局局长Raymond Khattar准将、黎巴嫩贝鲁特美国大学工程和建筑学院副院长Imad Elhajj教授、中国驻黎巴嫩大使馆大使钱敏坚,中国科学技术部国际合作司一级巡视员王蓉芳、亚非处处长肖蔚、三级调研员李鸿炜,中国科学技术交流中心项目主管栾...
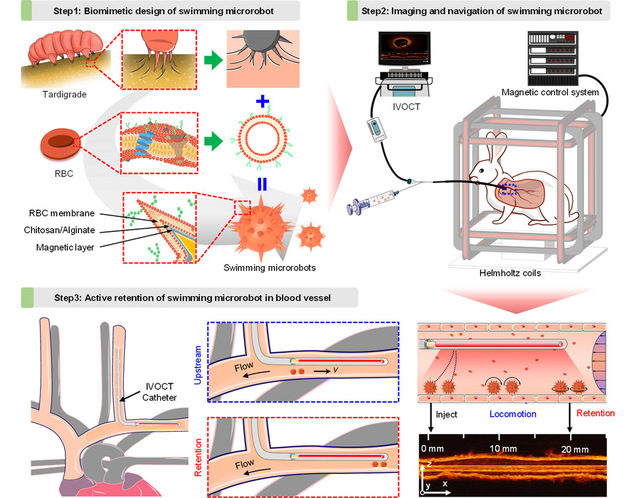
近日,机器人技术与系统全国重点实验室、哈尔滨医科大学第一附属医院等联合开发出仿水熊虫医用微纳机器人,可实现在静脉血高速流环境中可控运动及靶向驻停,相关成果以《可在血管中靶向驻停的仿水熊虫医用微纳机器人》(Bioinspired claw-engaged and biolubricated swimming microrobotscreating active retention in blood ...

中国科学院宁波材料技术与工程研究所先进制造技术研究所成果:低成本流水线用四轴并联机器人项目。
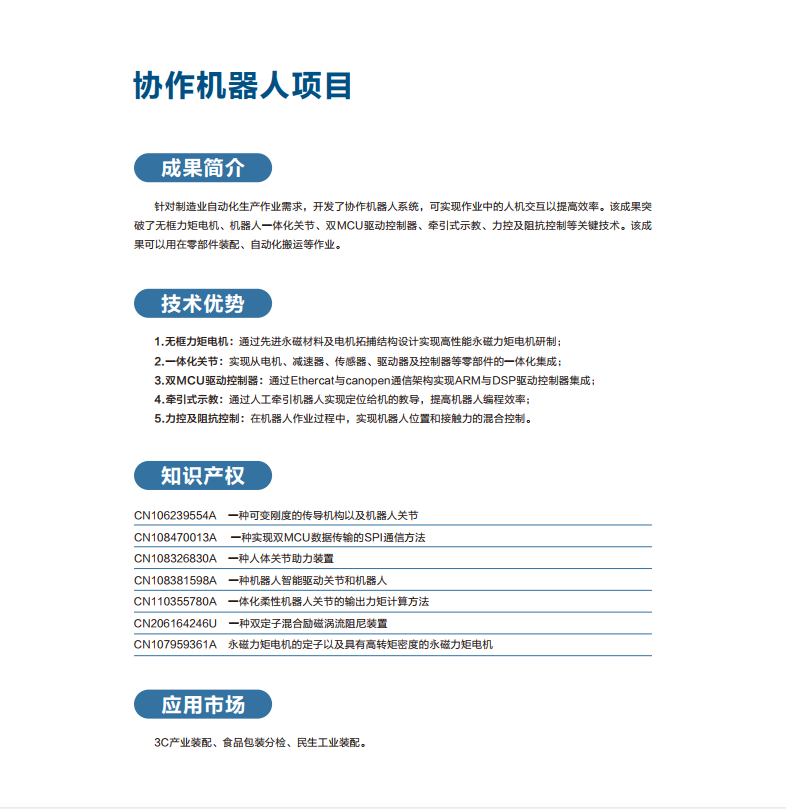
中国科学院宁波材料技术与工程研究所先进制造技术研究所成果: 协作机器人项目。
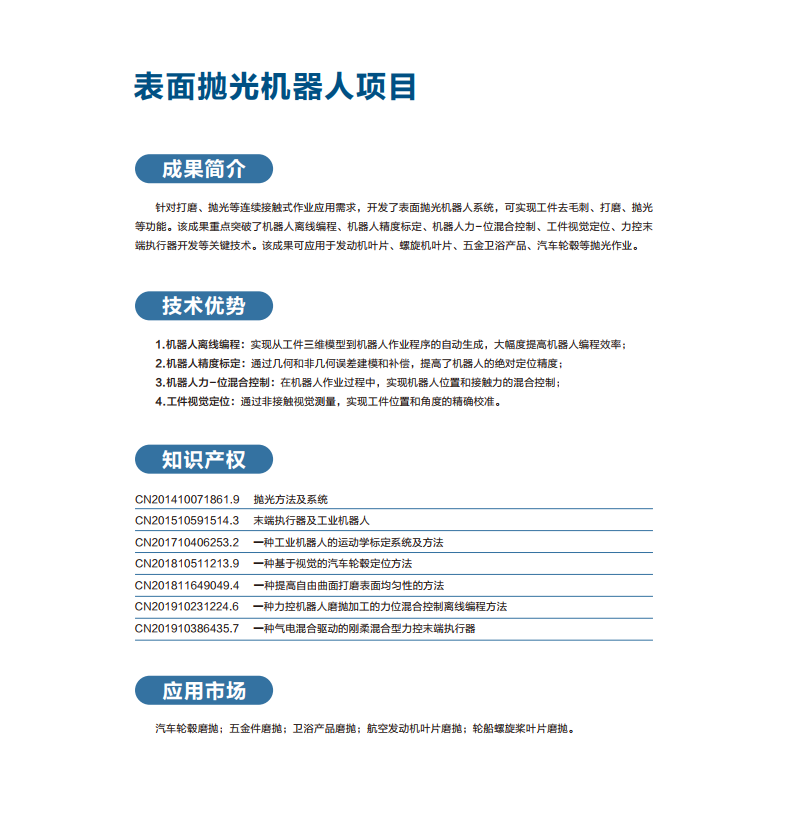
中国科学院宁波材料技术与工程研究所先进制造技术研究所成果:表面抛光机器人项目。

近日,第十四届中国国际航空航天博览会在珠海开幕,中国科学院沈阳自动化研究所机器人学国家重点实验室多项科技成果亮相此次航展。在此次航展上,机器人学国家重点实验室展出了自主研发的“云雀”高原型无人机实物、可回收式固定翼无人机蜂巢系统模型,以及多项成果通过展板形式展出。现场通过影像资料展示了“云雀”无人机实现我国首次机器人化高海拔科考和固定翼无人机蜂巢系统船载释放回收等相关工程应用成果。

自动门已逐渐成为各种建筑物、交通工具、自动化装备等重要的功能部件,拥有巨大的市场规模和发展前景。常规平移门由于存在中间传动环节和传动磨损,故障率较高。为此,精密驱动与智能机器人技术团队在国际上首次提出并实现了磁悬浮直驱技术,利用直线电机动定子间的永磁吸力抵消移动部件的重力,大幅减小轨道正压力,提高设备使用寿命;并利用直线电机动定子间的电磁推力驱动移动部件直线运动,获得高速、高加速的直线运动。团队在...

2022年9月14日,由广东省机械工程学会组织并主持,在东莞市对南兴装备股份有限公司、东莞职业技术学院、 东莞华信智能技术有限公司、广东华中科技大学工业技术研究院和南兴装备(韶关)有限公司完成的“板式家具开料装备智能化关键技术及其应用”项目进行科技成果鉴定。

2022世界机器人大会取得丰硕成果(图)
世界机器人大会 机器人
2022/9/6
2022年8月18日至21日,由北京市人民政府、工业和信息化部、中国科学技术协会共同主办的2022世界机器人大会在京召开。中央政治局委员、北京市委书记蔡奇,全国政协副主席、中国科协主席万钢出席大会。工业和信息化部党组书记金壮龙出席大会并致辞。工业和信息化部党组成员、副部长辛国斌出席大会,作主旨报告并总结大会成果。工业和信息化部党组成员、副部长王江平,副部长徐晓兰参观大会展览。

哈尔滨工程大学电子政务建模仿真国家工程实验室世界5G大会参展成果接受黑龙江日报专访(图)
哈尔滨工程大学电子政务建模仿真国家工程实验室 世界5G大会 黑龙江日报 数据采集机器人 数字凭证
2022/9/13
数字经济时代,数据是最重要的要素资产。用电、环保、耗能等数据如何高效、安全、合规交易,换取“真金白银”?数据资产如何像土地、劳动力等要素一样参与到市场经济中?在10日至12日举行的世界5G大会上,哈尔滨工程大学电子政务建模仿真国家工程实验室(以下简称“实验室”)展出的数据采集机器人和数字凭证两项成果,将有效解决上述问题。

2022年4月14日,中国食品和包装机械工业协会科技成果鉴定会采用视频会议的方式,分别在北京和广州设立会场对广州达意隆包装机械股份有限公司承担的“PET瓶(桶)装饮用水吹灌旋智能一体机”项目科技成果进行组织鉴定。来自行业科研院所、设计院、高等院校、企业等单位的专家共聚“云端”应邀参加会议。

浙江省机器人与智能装备技术重点实验室成果:应用于机器人磨抛的力控末端执行器(图)
机器人 力控 末端执行器 磨抛过程
2023/3/16
机器人磨抛作业属于连续接触式加工,在磨抛过程中不仅要对机器人进行精确的位置控制,还要进行接触力控制,以提高加工精度。目前工业机器人进行力控制的方法主要有两种,即通过控制机器人关节力矩的直接力控法和利用机器人外部附加装置的间接力控法。前者需要建立准确的机器人动力学模型,并且机器人的大惯性会影响力控的动态响应速度和精度。后者可通过增加一个具有力控制功能的末端执行装置,与机器人通过宏微协调实现精准的力控...