
搜索结果: 61-75 共查到“知识要闻 机器人控制”相关记录721条 . 查询时间(0.781 秒)

中国科学院广州分院深圳先进院搭建机器人辅助胶体纳米晶数字制造平台(图)
深圳 机器人 胶体 纳米晶数字
2023/3/20
2023年3月6日,中国科学院深圳先进技术研究院(简称“深圳先进院”)材料所喻学锋、赵海涛团队及其合作者在国际学术期刊《自然-合成》(Nature Synthesis)上发表题为“A Robotic Platform for Synthesis of Colloidal Nanocrystals”的文章。该工作首次将数据挖掘、数据驱动自动化合成、机器学习、逆向设计集成构建了机器人辅助胶体纳米晶数字...
南京埃斯顿自动化股份有限公司与三一机器人科技有限公司在智能制造领域达成战略合作
智能制造 工业机器人 运动控制 战略合作
2023/4/12
2023年2月20日,南京埃斯顿自动化股份有限公司(简称:埃斯顿自动化)与三一机器人科技有限公司(简称:三一机器人)在长沙举行战略合作签约仪式,双方将在智能制造领域建立长期战略合作伙伴关系。

2023年2月24日上午,应湖南师范大学信息科学与工程学院智能计算与语言信息处理重点实验室邀请,英国斯旺西大学李帅教授在中和楼342报告厅进行了主题为“递归神经网络及其在机器人控制中的应用”的学术报告。本次报告由信息科学与工程学院副院长肖林教授主持,科研办组织召开,2020级、2021级和2022级研究生及相关老师参加。

2023年2月中旬,中国科学院自动化研究所和华东医院自主研发的全新一代微创血管介入手术机器人VasCure成功完成首批5例临床冠脉支架植入手术。手术治疗成功率及器械递送成功率均达100%,不良并发症发生率0%,进一步验证了该手术机器人在临床阶段应用的安全性、稳定性、有效性,为推广该机器人进入临床应用奠定了坚实的基础,实现了微创介入手术机器人里程碑式的突破。

人们对微纳机器人的想象由来已久。20世纪60年代,科幻电影《神奇旅程》描述了一个缩小到细胞大小的“微型潜艇”进入人体的奇遇。而在现实世界中,科学家从未停止对微纳机器人的探索。特别是具有自我推进和导航能力的微纳生物机器人,因其可以到达现有器械难以企及的微观区域和精准度而受到广泛关注。
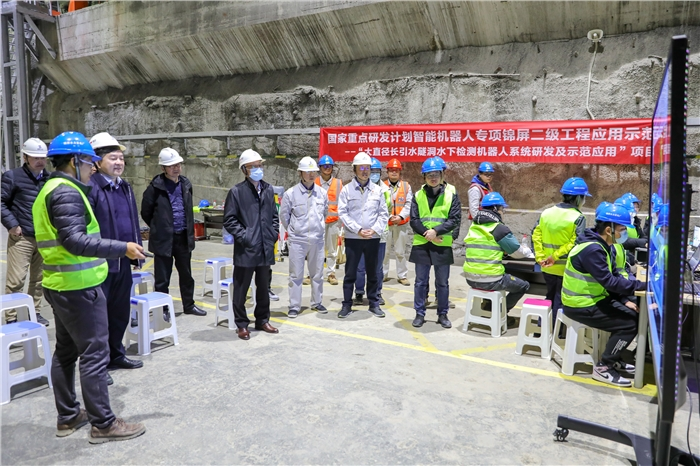
近日,由中广核研究院有限公司牵头的国家重点研发计划“智能机器人”重点专项“大直径长引水隧洞水下检测机器人系统研发及示范应用”在雅砻江锦屏二级水电站引水隧洞完成示范应用,机器人各项性能指标满足现场工程巡检要求。
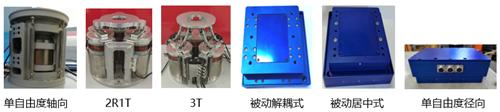
宁波材料所在磨抛机器人方面取得进展(图)
磨抛机器人 系统结构 氮气弹簧
2023/7/13
磨抛是典型的连续接触式操作,力控技术直接影响磨抛效率和质量,因而至关重要。传统上,一般采用基于机器人关节力矩的直接力控方法,存在力控精度低、动态响应慢等缺点。而机器人加力控末端执行器的间接力控方法采用了宏微系统结构,在小范围内动作时只需调整力控末端执行器的位姿即可,避免了宏机器人大惯性动作对力控精度和动态响应的影响,可有效解决直接力控方法存在的问题。目前,虽然有研发机构或公司研制了力控末端执行器,...

2022“智新杯”全国人工智能机器人创新大赛颁奖典礼成功举行(图)
智新杯 人工智能 机器人 颁奖典礼
2023/11/12
2023年1月7日,由中国人工智能学会(CAAI)主办、CAAI人工智能基础专委会承办、国际信息研究学会协办的(第五届)2022“智新杯”全国人工智能机器人创新大赛颁奖典礼通过线上形式成功举行。
关于2022机器人科技竞赛与实践教学研讨会延期举办的通知
2022年 机器人 研讨会 延期
2022/12/31
鉴于近期国内疫情情况较为复杂,部分地区连续新增确诊病例,疫情传播风险增大,为保障各位参会老师的健康和安全,降低疫情传播风险,经与多方沟通协调,慎重考虑,决议将原定于2023年1月7日一9日在云南省昆明市举办的2022机器人科技竞赛与实践教学研讨会延期举办。
2022中国机器人大赛暨RoboCup机器人世界杯中国赛(2022年11月)比赛已结束,现将比赛证书及发票的领取方式公布如下。
论文题目:基于POMDP的机器人拾放杂乱物体的规划及其优化。答辩人:赵文锐。时间:2022年12月16日14:00。关键词:机器人操作,运动规划,任务规划,非结构化环境,POMDP。

2022年11月23日,2022世界智能制造大会发布了“2022世界智能制造十大科技进展”“2022中国智能制造十大科技进展”共20项智能制造科技成果。其中,中国科学院沈阳自动化研究所“变刚度薄壁复杂曲面零件机器人智能磨抛”技术入选“2022中国智能制造十大科技进展”。
“极区科考机器人技术、系统与应用”专题论坛成功举行
极区科考机器人 专题论坛 空地协同机器人
2022/12/19
2022年11月26日,“极区科考机器人技术、系统与应用”专题论坛以线上方式举行。该论坛由依托于中国科学院沈阳自动化研究所的中国自动化学会机器人专委会主办,大会进行了全程直播。
以蚯蚓为灵感 科学家研发土壤分析农业机器人
蚯蚓 土壤分析农业机器人 土壤
2022/2/22
如果你想要了解某地的土壤条件,在理想状态下观察蚯蚓就可以了。但在实际操作过程中往往不太可能,为此科学家受到蚯蚓的启发,研制出了土壤分析农业机器人。这台由纽约康奈尔大学开发的机器人,长度在 1-2 英尺(30.5-60 厘米)之间。
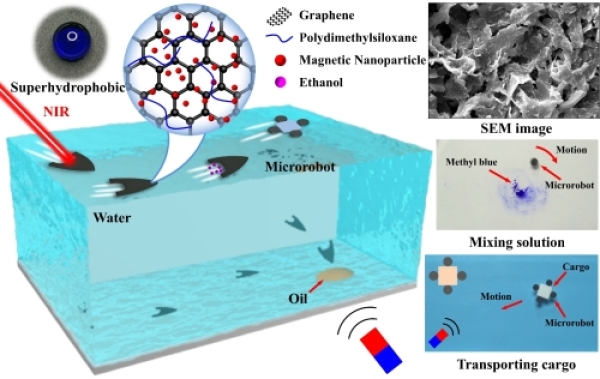
中国科学院沈阳自动化所微型机器人研究获进展(图)
沈阳自动化 微型机器人 驱动纳米机器
2022/12/2
超疏水微型机器人可以在外界刺激下在水面上高效游动,围绕这一现象科学家展开研究,探索这一特性在相关领域的应用前景,例如细胞操作、净化水源等。然而,目前大部分对于超疏水微型机器人的研究均是围绕单一刺激的驱动模式,使得超疏水微型机器人的运动和功能在复杂的水环境中受到限制。